This is a warning to others. I was tricked by the review youtube videos from Team Legit saying that the new dominators (HD v2 and Dominator v3) leading me to believe that they were best thing since sliced bread, and got a pair of each to see which one would fit me best, as a backup/alternate for my current collection:
First, let's remind everyone that fatshark goggles:
Are noticeably more expensive than other goggles and whether they'e better is debatable
Fatshark does not include a head tracker module, or even a basic 5.8Ghz receiver. Those cost extra, making the goggles even more expensive
There is no option for a diversity receiver like the skyzones (and it's awesome to have circular + helical on skyzone)
The fatshark dominator v3 are no better than the skyzones unless you can use HDMI in at 720p. Otherwise, I don't really see a good reason to buy them. The Dominator HDv2 have a huge screen/field of view, they do, but it's impossible for me to see it all due to insufficient IPD adjustment, and the sides of the screen are still blurry for me (unacceptable for a $520 goggle that doesn't even include a receiver or head tracker).
For me, they are overhyped expensive goggles that sell without a receiver but for more than their competition that includes 5Ghz receivers, but more importantly if they don't fit you, FS doesn't give a hoot. After buying a $520 fatshark HD v2, having to glue on some foam insert, or you can't even try them/wear them, and realizing their IPD is all wrong and I can't see the sides of the screen (and when I can, they are blurry), getfpv told me they could not refund me for them because fatshark would not take them back.
Needless to say that I'm not impressed with a company that refuses the returns of products used once and that they couldn't even design to work properly on wider western faces. The black foam insert on this picture actually needs to be glued on the goggles to really be able to try them on, and the moment you do that, they are not returnable.
Details:
My face is a bit wide, so I have to use max IPD on all goggles, and even then the distance between my pupils always seems to be a bit more than the goggles, so Im not seeing the sides easily, or at all.
The skyzone goggles are a great buy with their diversity receiver built in, but using them is not super comfortable for me due to the IPD problem.
The skyzone 3D V2 goggles have one extra mm in the max IPD, so they're almost ok for me.
Yet, I figured I'd try the newer fatsharks since they are supposed to have a great IPD. After seeing reviews that the HD Dominator v2 had the biggest visible screen in the market (not counting headplay), and that they were worth the money, I thought I'd give them a shot along with their cheaper cousin, the Dominator v3.
Well, sure enough they didn't fit me: I couldn't see the whole screen on the HD v2, and the sides were blurry on top of that.
Needless to say that I find it unacceptable that fatshark will not authorize returns of goggles that do not fit. I, for sure, will never buy anything from fatshark again. While I wish getfpv could have processed a return without charging me 20% restocking fee, they assured me that it was really only because that's the cost they incur from fatshark themselves who does not allow returns of used products, even if they didn't fit.
For my remaining options, while the fit isn't perfect, I'm pretty happy with my skyzones v2 3D, incredible bang for the buck (and the receivers work quite well, I got more than 7km out of them). The fatshark dominator v3 also fit me ok enough, but don't even come with an RX receiver which costs extra and isn't a diversity receiver like the skyzones, nor do they support real 3D with 2 streams, again like the skyzones do (but skyzone v1 does not have built in recording, only skyzone v2 does).
Hope this helps and I hope fatshark changes their policies, because their current one sucks.
To be fair, maybe other goggles are hard to return too, but at least you can use them while keeping them 100% pristine, and being abel to return them at minimal cost if somehow they don't fit you.
MinimOSD-Extra is the open source arduino software that takes mavlink data from ardupilot and creates an on screen display on top of your real time video to give you a clue where you are, which direction you should go to fly back to home, how much battery you have left, altitude, airspeed, and artificial horizon if you're flying IFR, at night, or your camera being displayed (I have 3, one rear facing) does not give you a proper horizon you can refer to for hand flying.
Sadly, the device it runs on only has a measly 32KB of flash space, and with all the code it needs to interface with mavlink/ardupilot, talk to a video chip, and do calculations before displaying the result, you can't add much of anything to the current codebase. For reasons that I do not understand, I have not found anyone making an OSD board that would be compatible with the current code while providing more storage for new code.
While I'm not a big fan of the closed source commercial Vector flight controller, it has a really good OSD compared to ardupilot and minimosd. In the meantime, though, I needed minimOSD to be able to rotate my OSD screens without burning an extra switch on my transmitter. I need to rotate screens because I'm doing 3D FPV flying and it's distracting to have OSD data in one eye when you're trying to get a 3D effect from 2 images :)
The way you can do this without burning an extra RC channel is to use rotation swiching on an existing channel (you can also use rotation switching on the APM mode switch, but that never worked reliably for me), but the released code rotates forever as long as your switch is not in the down position, making the switch not usable for anything else.
Thankfully it's open source, so I was able to take the arduino code and improve it to do what I needed. Now, with my custom branch I can rotate the OSD screen by simply flipping any selected switch to any position and then back. This works with the mode switch too if you'd like (sadly the channel number is hardcoded to only be 5 to 8).
You can get my version from https://github.com/marcmerlin/MinimOSD-Extra (only compiled for plane, but you could port the code to copter if you wish). I've also cleaned up all the compilation warnings in the code, and removed a bit of dead code I found.
Here are some screenshots from my OSD configuration:
60 degree pitch up, 82% power, 41A, 533W used
stall speed 27kph under near full throttle
The OSD horizon comes in handy when switching from the FPV camera to the bottom and rear facing cameras:
FPV cam
bottom cam
rear cam
OSD flipping:
OSD screen #2
OSD screen off to allow for a proper 3D view
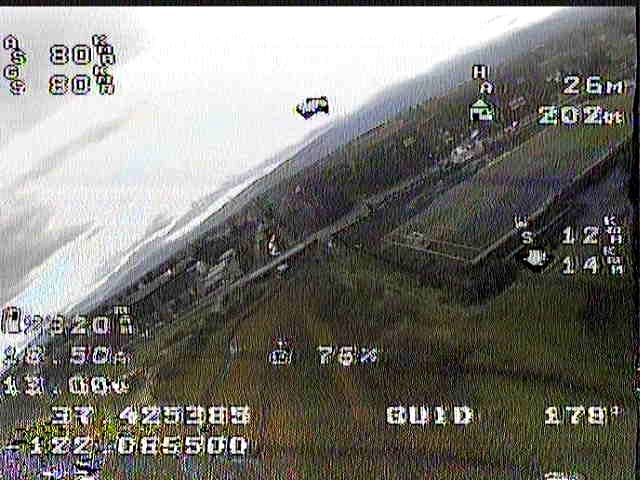
This is also useful for debugging and filing bugs. Guided mode was supposed to take over at 70m (it did), and fly back up (it did not, it pitched down, went up to 80pkh while pitching down and losing altitude down to 26m before I took over for manual flight):
In 5 years, many things changed in the campus, it got so much bigger, and I wanted to be able to get other buildings that I wasn't able to reach safely. I was however not comfortable enough doing this while piloting with just a ground view and without safety info like real time battery status, winds, and so forth. This is why I waited that long until I had a new plane setup for FPV (first person view) with an OSD (heads up display equivalent) that could give me real time flight information, including winds, motor power, altitude, glide ratio and battery remaining.
lots of electronics involved
FPV ends up being safer due to how much information you have when flying, better than many full size private planes
If you are curious about the plane itself, a BFG 2600 with pixhawk, 800W motor, 4000-5000mAh 4S lipo, 2 mobius cameras, 2 top FPV cameras for optional 3D flying, , 433Mhz dual path frequency hopping openlrs receiver with back channel for telemetry (good for 20-30 km range), 600 to 2000mW 5.8Ghz video (good for at least 7km range), and 900Mhz control and telemetry backup channel. This is absolutely overkill for those kinds of short range flights, but when safety is involved, overkill is good :) You can read more about it here.
The next problem were the 2 airports within range, Moffett and Palo Alto. Moffett was not much of a problem since it has very little traffic and was not in the way, Palo Alto however is located so that landing planes can fly over Google. This was solved by checking with the airport and having an airnav radio to listen on tower frequency for landing airplanes to help a spotter look for traffic. The other thing was to keep the altitude as low as possible so as to be below altitudes airplanes could reasonably be expected to be. However in theory, landing airplanes could fly below 400ft, so using a spotter was helpful.
Also, for safety of flight of the RC plane, it was also desireable in places to have a bit of altitude in the bank so as to be able to fly to a safe landing spot as opposed to crashing on a road or over people in case of a motor failure (flying times and locations were chosen so as to minimize people and cars). The plane itself if a 2.6 meter foam glider, so it is able to glide quite a distance without motor power.
The RC plane itself is flying with ardupilot, a very capable auto pilot that computes winds real time, gliding distance if the motor isn't running, real time battery used and remaining, and most importantly was programmed with a minimum altitude deck to take over from the pilot, recover from a bad flight condition and fly back to the landing spot on its own if the pilot were to lose video or control ability, or just to get confused and make a mistake (if you wonder, for landing the pilot turns this off, or the airplane would not come down low enough to land). The last safety aspect was the fact that the plane was more than 95% compressible foam with a plastic propeller that folds back when not in use. This means that in case of failure and impact, it does not fall nearly as fast as a quadcopter, and it absorbs most of the Gs on impact by destroying itself while causing very minimal to no damage to something that could be hit, should it not be the ground. A quadcopter would be absolutely unsafe to fly over people and cars at any time due to the amount of damage and injury or worse, it can cause in case of impact.
While this may look easy, I want to stress that it wasn't. The pilots had more than 10 years flying RC and/or full size planes and were extremely mindful of safety. While I'm happy to share this with you, I want be clear that this is not an invitation to emulate those flights with an RC aircraft you just bought, and definitely not with a multi rotor/quadcopter aka drone, as the non toy sized ones are just not safe to fly over people. Foam RC planes are extremely unlikely to cause real injury to people in case of impact, while multi rotors of a certain size can unfortunately kill someone if they fall straight down on their head from a certain altitude. I refer you to this page for a longer discussion about the safety aspects
However, in a nutshell: flying, airspace, and safety can be quite complex, so I don't entirely blame the FAA for not trusting the average RC pilot without proper training on all 3 (even if said RC pilot is very capable at flying an RC aircraft, which is not true of all), and trying to put over restrictive rules as a result. Still, I hope they can work with the AMA to come up with more reasonable restrictions even if the current ones still aren't legally binding yet (outside of registration of pilots or aircraft), and ideally come up with a class of RC pilots who has acquired additional airspace and safety knowledge, and would be bound to less restrictive rules.
The pictures and videos below were made from clips taken from a few flights over a 6 month period of time in 2015. Flights were flown by different people, at times I was the spotter on the ground and safety backup pilot. The pictures are not in chronological order, and the 4 video mashups (one per area), are made out of clips pasted out of order.
The 4 videos are here, these have music. The 4 copies below in each category, are with original RC sounds (click on the link to get the 1920x1080p version on youtube):
Here are now pictures and videos for the 4 areas flown:
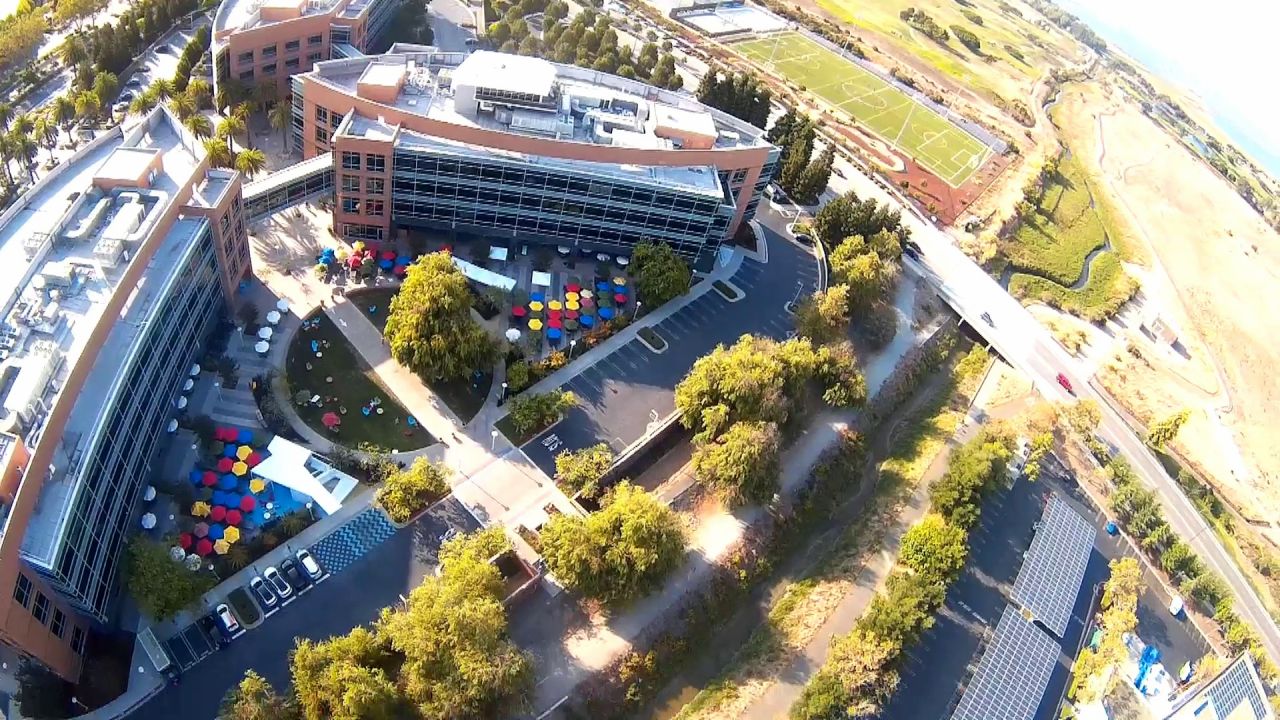
Google Main Campus
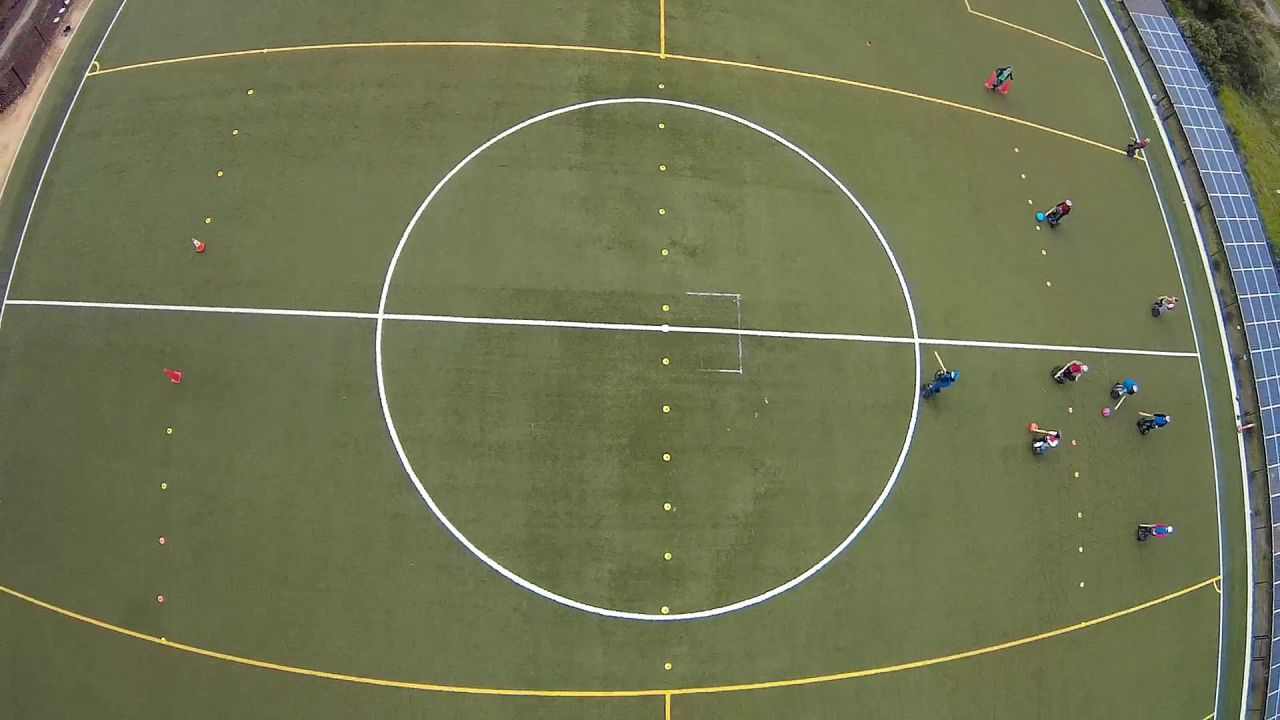
The soccer field across and other sports fields. Video summary (with RC sounds, choose the video in the list of 4 above to get the version with music):
Screenshots:
It's right across from 1950 Alsa:
Nextdoor is the so called main campus, B40-43:
Google West Campus and Other Surrounding Buildings
Across the street, B44, and ACI which I didn't know had their name on their roof. Maybe if someone comes to bomb Google, they want to be spared :)
Video summary (with RC sounds, choose the video in the list of 4 above to get the version with music):
Screenshots:
B45, B46, B47:
1098 and 900 Alta:
Moving to Landings and Google West Campus (formerly 0, 1, E, and Pi):
Google Crittenden Campus
Across shoreline, is the Crittenden Campus and other tenants on Stierlin Ct.
Video summary (with RC sounds, choose the video in the list of 4 above to get the version with music):
Screenshots:
pretty full parking lot
Moffett Airport is just next door, so while it was possible to get one shot of it without entering their land, it had to be done carefully (while the runway wasn't active, even if the RC plane never got close to its extended centerline, a very bad idea no matter what)
Nearby Shoreline Amphitheatre, Golf Links and Bay Marshlands, Intuit Buildings
Last, but not least, here are some shots the the bay surroundings, again some had to be taken carefully so as not to conflict with airplane traffic going in and out of Palo Alto airport (using a spotter and being on tower frequency)
Video summary (with RC sounds, choose the video in the list of 4 above to get the version with music):
Screenshots:
Pictures of Shoreline Amphitheater:
Intuit Campus:
Michael's at Shoreline by Golf Links. Where my friend Grant had his birthday :)
This was written in december 2015 with the latest firmware available at the time.
I worked with a Vectone on an hexacopter, and honestly I was very not impressed with it.
On one side, it looks polished, it's nice to have the OSD built in the flight controller.
There is a nice professional manual (vs ardupilot where the docs are ok, but just not as polished).
However, as far as doing its main job of being a flight controller for the hexacopter, it sucked.
Once, only once did I get to run the level function and did it fly the copter level.
All other times, I had to put various amounts of trim (sometimes so much trim that it would not arm without all that rim), and once you give it all that trim, if you do a 360 rotation, it tends to wobble or tumble depending on how much trim you have.
I can't say how many times Eric and I levelled it (and it was really level), but either way an imperfect level is not an excuse. The copter can see in flight that it's pitched and moving in one direction without corresponding RC input, and cancel that out. It sure does not.
It randomly (50% of the time) failed to work in altitude hold mode. Loiter (GPS hold) never worked despite GPS signal. Compass had been configured (and that was a pain), and during the flights, the OSD said it has to be configured again (and this was the latest firmware)
In the meantime: Arducopter has autotune. I can't say how awesome autotune is to auto-set pids for a given airframe.
Vector does not.
Arducopter has EKF to double calculate everything using all available sensors.
Vector does not, and sucks as an hexacopter flight controller in my experience (and Eric had the same problems as I did, even after fully reconfiguring the flight controller).
Arducopter/pixhawk uses 2 compasses (one in the FC, one external).
Vector does not.
Pixhawk supports 14 inputs and outputs.
Vector supports 6 channels (so you need to have other channels available as PWM on your receiver, which may not be possible if you want 14 or 16 total).
Vector cannot be configured via computer while in flight, or while armed and requires wireless video for remote configuration (not great if you don't have an FPV screen).
Ardupilot uses a wireless radio/serial connection and can be fully configured/monitored while armed or in flight.
While I liked the polish and wiring of the vector, the fact that it is clearly inferior as a flight controller for hexacopters at least, makes it a poor choice in my opinion.
Too bad. I kind of wanted to like it, especially because its OSD is far superior from minimOSD on ardupilot.
I went to Moffett to help with data collection of hangars from the inside. Got a few nice shots while there, we even got a couple of F18s that took off for us:
We then went to the next hangar, with big doors we got to open :)
This is my review of the Skyzone SKY02 V3 AIO 3D FPV Goggles, which I got to supplement my Skyzone Dual Antenna FPV Goggle V2:
I had the old Skyzone 2D goggles with dual receivers and diversity controller, and I quite like them. However, they are sadly made for smaller faces than mine, and even by putting the lenses as far away as possible, it's barely wide enough and I have to strain a bit to see the whole screen. Bummer.
Summary of Skyzone 2D vs 3D:
3D has 3D (obviously), but with each receiver getting a separate full resolution image (vs fatshark and others that do SBS, i.e. half resolution)
Both have the same diversity controller (two receivers, two antennas), and in 3D mode you change diversity for 2 separate receivers. Range of the receivers seemed equivalent in my side by side real world flying test (some reviews said the early versions of the 3D had a bad receiver, mine did not)
Nice OSD menus in the 3D (not present in the 2D)
Support for recording to microsd card (sadly 2D recording only, I'd have loved 3D recording)
As a minus, in PAL, the 3D goggles crop a little bit of the bottom of the picture, I had to move my OSD text up one line (not an issue in NTSC)
The IPD is slightly better (see below) for my eyes
The 3D comes with a dual VTX and a dual camera (the 2D comes is goggles only). To be honest, I'd have loved to buy the 3D goggles only.
The skyzone 3D goggles sadly don't offer much more IPD (interpupillary distance), but the extra 1mm helps a bit and wearing them is a bit better for me than wearing the 2D goggles.
I have just now tried some fatshark Dominator HDv2 and dominator v3s, and both also make it impossible to see the whole screens from left to right with both eyes on max IPD setting. That's disappointing, but basically means that the IPD on the skyzone 3Ds isn't really much worse for my face. In real life each of my 2 eyes misses a small part of the side of the screen, and the other eye makes up for it, so it's not too bad.
I was however worried when I saw reviews that were saying that the receivers on the new skyzones, were of poor quality and range. Without knowing for sure, I ordered them and went to test them. To my relief, they gave me the same 5km flying distance I was getting with the original 2D skyzones. In other words, the skyzones 3D are just a positive upgrade from the 2D ones.
Next, was trying 3D. Most people seem to have tried them on quadcopters to fly between trees at close range. That's all nice and good but my application was a plane, and not flying that close to objects. I was also not very impressed by how heavy and bulky the default camera was, as well as the dual VTX. At the same time, I didn't have high hopes of the dual VTX being any good for long range, having 2 transmitters that close to one another cannot be good. So, I ended up using 2 regular VTXes, with more room between them, and reverse polarized circular polarized antennas.
This is what the default setup looks like:
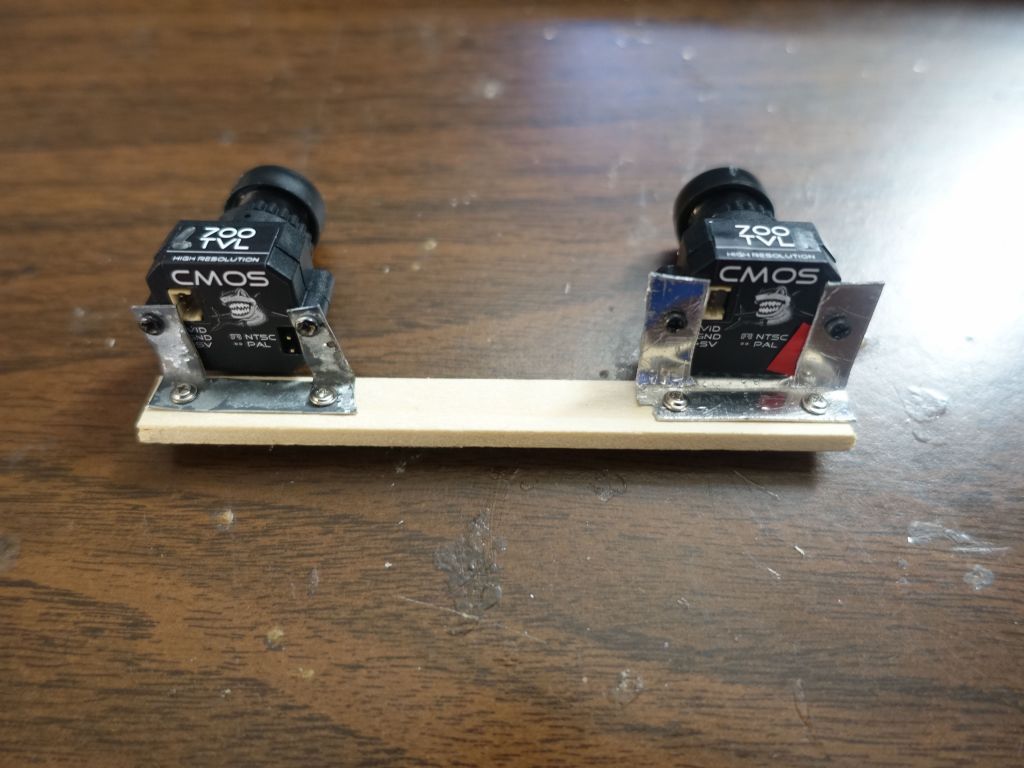
So, this is what I did: I made my own 3D camera, one with the proper IPD (the skyzone cameras are too close), and one with a very elongated point of view, almost like a hammerhead shark. It helps seeing 3D effects at longer distances (more than you would see with normal vision).
I used the stock camera (but not VTX) for my first test. It was very disappointing because the camera could see the plane, and that ruined the 3D effect. Also, as expected the 3D perception wasn't going to work well with the cameras so close to one another:
So I made my own 3D camera:
narrow
wide
install before flying
2 video transmitters, 600mW with LHCP antenna, and 2W with RHCP in the back
I've only done one test flight with that setup, but having the cameras be far apart works great for seeing 3D at a longer distance, and also I'm not seeing the plane, which is good. The only issue is that my servo doesn't have enough torque to deal with that much weight, so when I have the wide camera setup installed, I just unplug the rotation servo.
Using the 2 VTX with some distance between them, and RHCP + LHCP gave good results, I was able to fly 5km away without problems.
All in all, it's a pretty cool system, even if I don't like their cameras or the bundled dual transmitter (they should sell the goggles alone for people like me), it's a very cool setup. Now please just make one for faces that are wider and allow more IPD like fatshark does.
The most unfortunate thing is that the goggles cannot record 3D, they only record one eye in 2D. To get 3D, I'd have to use 2 sets of goggles, each to record one channel, and then synchronize the recordings and make some SBS video out of it. Sounds like a lot work...
Update:
Actually, since I realized that I cannot turn my dual camera setup anymore, I went ahead and put the cameras even farther apart: in the wings. They are a bit hard to line up, but they do give a better 3D effect at even greater distances now:
I have about 1m between the cameras, and should try to move them even farther apart






































































")