In 5 years, many things changed in the campus, it got so much bigger, and I wanted to be able to get other buildings that I wasn't able to reach safely. I was however not comfortable enough doing this while piloting with just a ground view and without safety info like real time battery status, winds, and so forth. This is why I waited that long until I had a new plane setup for FPV (first person view) with an OSD (heads up display equivalent) that could give me real time flight information, including winds, motor power, altitude, glide ratio and battery remaining.
lots of electronics involved
FPV ends up being safer due to how much information you have when flying, better than many full size private planes
If you are curious about the plane itself, a BFG 2600 with pixhawk, 800W motor, 4000-5000mAh 4S lipo, 2 mobius cameras, 2 top FPV cameras for optional 3D flying, , 433Mhz dual path frequency hopping openlrs receiver with back channel for telemetry (good for 20-30 km range), 600 to 2000mW 5.8Ghz video (good for at least 7km range), and 900Mhz control and telemetry backup channel. This is absolutely overkill for those kinds of short range flights, but when safety is involved, overkill is good :) You can read more about it here.
The next problem were the 2 airports within range, Moffett and Palo Alto. Moffett was not much of a problem since it has very little traffic and was not in the way, Palo Alto however is located so that landing planes can fly over Google. This was solved by checking with the airport and having an airnav radio to listen on tower frequency for landing airplanes to help a spotter look for traffic. The other thing was to keep the altitude as low as possible so as to be below altitudes airplanes could reasonably be expected to be. However in theory, landing airplanes could fly below 400ft, so using a spotter was helpful.
Also, for safety of flight of the RC plane, it was also desireable in places to have a bit of altitude in the bank so as to be able to fly to a safe landing spot as opposed to crashing on a road or over people in case of a motor failure (flying times and locations were chosen so as to minimize people and cars). The plane itself if a 2.6 meter foam glider, so it is able to glide quite a distance without motor power.
The RC plane itself is flying with ardupilot, a very capable auto pilot that computes winds real time, gliding distance if the motor isn't running, real time battery used and remaining, and most importantly was programmed with a minimum altitude deck to take over from the pilot, recover from a bad flight condition and fly back to the landing spot on its own if the pilot were to lose video or control ability, or just to get confused and make a mistake (if you wonder, for landing the pilot turns this off, or the airplane would not come down low enough to land). The last safety aspect was the fact that the plane was more than 95% compressible foam with a plastic propeller that folds back when not in use. This means that in case of failure and impact, it does not fall nearly as fast as a quadcopter, and it absorbs most of the Gs on impact by destroying itself while causing very minimal to no damage to something that could be hit, should it not be the ground. A quadcopter would be absolutely unsafe to fly over people and cars at any time due to the amount of damage and injury or worse, it can cause in case of impact.
While this may look easy, I want to stress that it wasn't. The pilots had more than 10 years flying RC and/or full size planes and were extremely mindful of safety. While I'm happy to share this with you, I want be clear that this is not an invitation to emulate those flights with an RC aircraft you just bought, and definitely not with a multi rotor/quadcopter aka drone, as the non toy sized ones are just not safe to fly over people. Foam RC planes are extremely unlikely to cause real injury to people in case of impact, while multi rotors of a certain size can unfortunately kill someone if they fall straight down on their head from a certain altitude. I refer you to this page for a longer discussion about the safety aspects
However, in a nutshell: flying, airspace, and safety can be quite complex, so I don't entirely blame the FAA for not trusting the average RC pilot without proper training on all 3 (even if said RC pilot is very capable at flying an RC aircraft, which is not true of all), and trying to put over restrictive rules as a result. Still, I hope they can work with the AMA to come up with more reasonable restrictions even if the current ones still aren't legally binding yet (outside of registration of pilots or aircraft), and ideally come up with a class of RC pilots who has acquired additional airspace and safety knowledge, and would be bound to less restrictive rules.
The pictures and videos below were made from clips taken from a few flights over a 6 month period of time in 2015. Flights were flown by different people, at times I was the spotter on the ground and safety backup pilot. The pictures are not in chronological order, and the 4 video mashups (one per area), are made out of clips pasted out of order.
The 4 videos are here, these have music. The 4 copies below in each category, are with original RC sounds (click on the link to get the 1920x1080p version on youtube):
Here are now pictures and videos for the 4 areas flown:
Google Main Campus
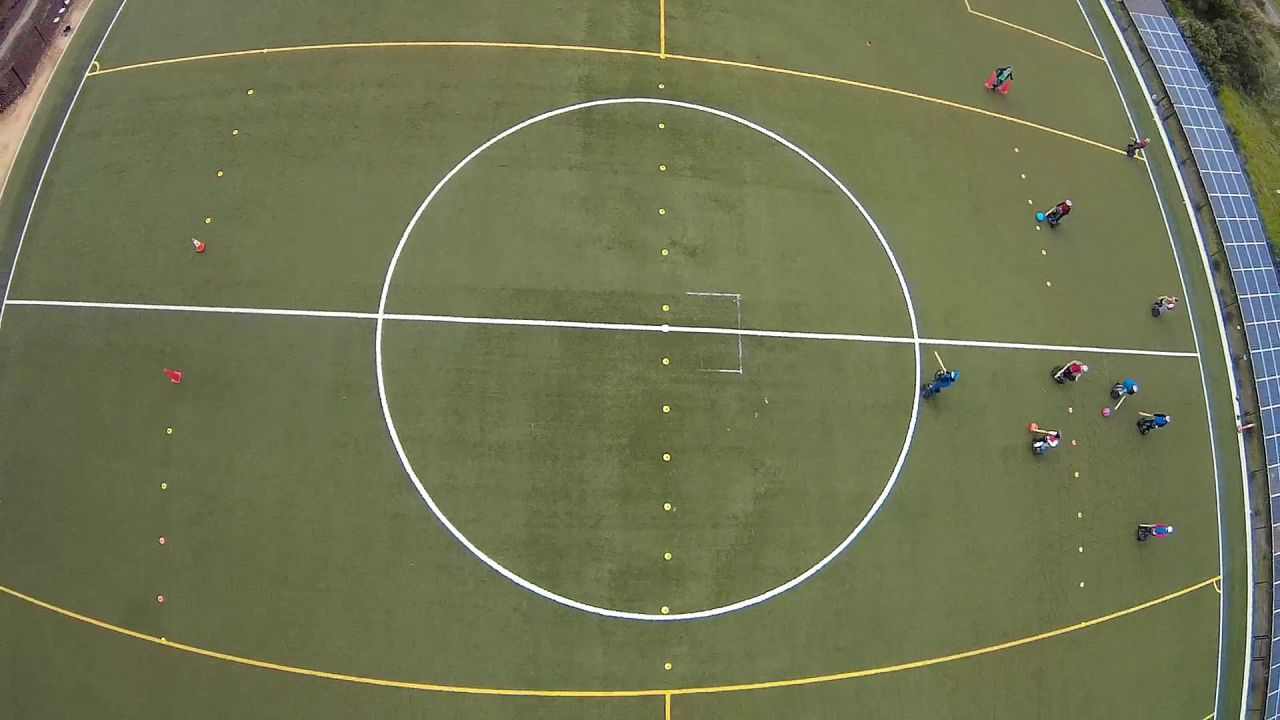
The soccer field across and other sports fields. Video summary (with RC sounds, choose the video in the list of 4 above to get the version with music):
Screenshots:
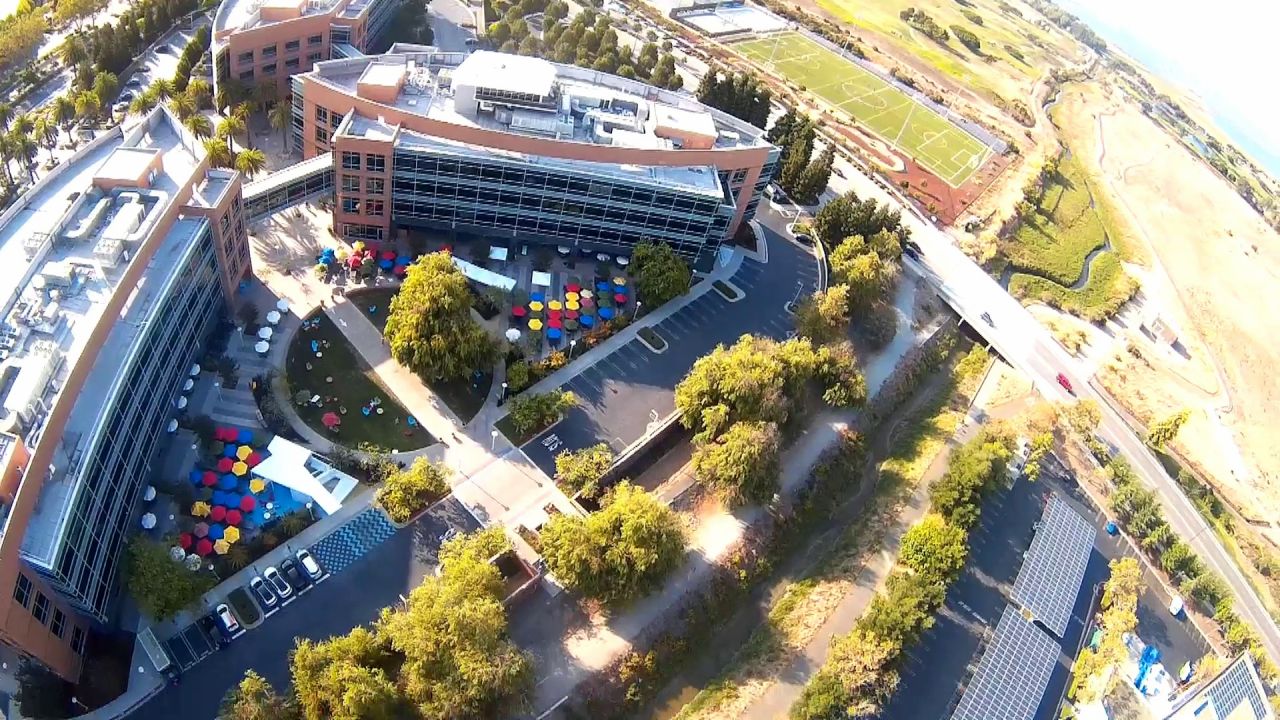
It's right across from 1950 Alsa:
Nextdoor is the so called main campus, B40-43:
Google West Campus and Other Surrounding Buildings
Across the street, B44, and ACI which I didn't know had their name on their roof. Maybe if someone comes to bomb Google, they want to be spared :)
Video summary (with RC sounds, choose the video in the list of 4 above to get the version with music):
Screenshots:
B45, B46, B47:
1098 and 900 Alta:
Moving to Landings and Google West Campus (formerly 0, 1, E, and Pi):
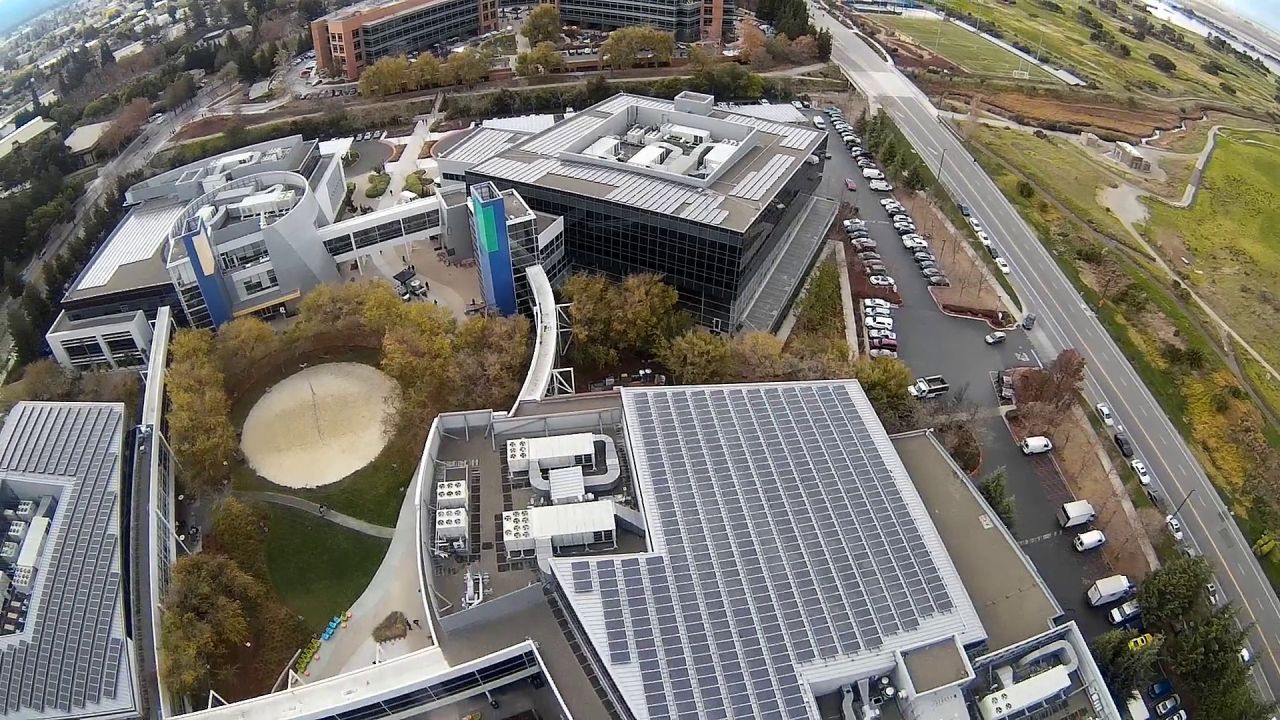
Google Crittenden Campus
Across shoreline, is the Crittenden Campus and other tenants on Stierlin Ct.
Video summary (with RC sounds, choose the video in the list of 4 above to get the version with music):
Screenshots:
pretty full parking lot
Moffett Airport is just next door, so while it was possible to get one shot of it without entering their land, it had to be done carefully (while the runway wasn't active, even if the RC plane never got close to its extended centerline, a very bad idea no matter what)
Nearby Shoreline Amphitheatre, Golf Links and Bay Marshlands, Intuit Buildings
Last, but not least, here are some shots the the bay surroundings, again some had to be taken carefully so as not to conflict with airplane traffic going in and out of Palo Alto airport (using a spotter and being on tower frequency)
Video summary (with RC sounds, choose the video in the list of 4 above to get the version with music):
Screenshots:
Pictures of Shoreline Amphitheater:
Intuit Campus:
Michael's at Shoreline by Golf Links. Where my friend Grant had his birthday :)































































")

















