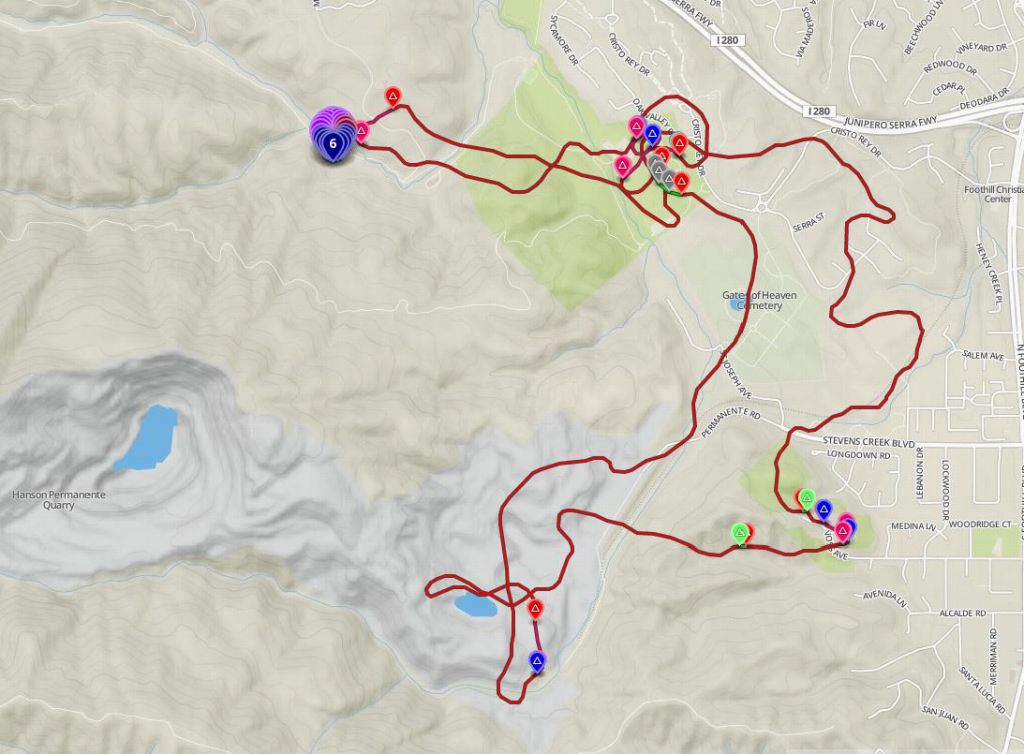
The flight below is best viewed full screen in 1080p to appreciate the OSD view (not that great, but what I was flying with) vs the 2HD pictures (front and rear) and the flight replay on a map showing where the plane was at that time, showing how I flew around a hill and overflew a quary I didn't have light of sight to, at all.
")
decked out, probably more than it was meant to :)

3 cameras, one for OSD, 2 high res

ready for flying
Here is the main video (again, recommended to see full screen):
The stats at the end show that:
The video crapped out a bit due to the distance and the fact that I had to manually re-orient my patch antenna a few times (guesstimating while wearing the goggles and flying). I also almost flew behind a ridge and the video (600mW) and Frsky L9R mostly held kept the signal running.
The video commentaries are from my wife who was wearing a 2nd pair of goggles and had never seen an FPV flight :)
The 2 high res videos were taken with 2 mobius cameras and the virtual flight in the bottom right was created with the datalog from the ardupilot pixhawk that was controlling the plane when signal was lost. The videos were hand synchronized by me because the OSD video was 10 seconds short as a result of the video dropouts.
If you'd like the individual videos:
Unfortunately, my Cularis met its demise after this flight, but like the condor it'll be reborn from its ashes soon :)
This page also shows how it was built and what's inside.