I wanted a big glider with flaps, and a front motor (not a crappy little pusher motor with whiny prop that would never have a lot of trust for takeoff with a heavy load). The Diamond 2500 turned out to really be the only match I could find, but it was out of production. I did however find that the Hobbyking BFG 2600 was a Chinese ripoff of it, which in this case came in handy because the original wasn't around anymore.
I typically would wary of RC gear from China because too much of it cannot be trusted, but in this case I didn't really have many other options. So, I read up on the failure rates and quickly found out that I should immediately throw away the ESC and replace it with a proper one. To be fair, the entire aircraft was $200 and my replacement ESC only was $90 (Castle Edge Lite 75A). The good news was the 60A motor seems to be decent enough so far, which is good because my old motor from the Cularis would not fit on this model anyway. Update: Motor is crap too, I burned both motors I got. The motor makes incredible power for its size and weight (and likely price), but nothing is free, the motor is too small and too light for the amount of power it puts out, buyer beware... Turnigy L3020B-600 Brushless Motor (800w) seems to be the smallest replacement that will fit.



here are bigger motors that should provide the power without burning up

you can see how much smaller the stock motor is, no wonder it burns up
The BFG2600, is indeed a big f'ing glider, as can be seen next to my X-UAV Talon with wing extensions (2.6m wingspan instead of 2m wingspan). Obviously the BFG is much more aerodynamic than the Talon which is a big of an air SUV :)
Thankfully it also flies at slower speeds and has very efficient flaps which when used as crow flaps allow for a steep slow descent for landing in smaller places (the X-UAV Talon does not fly slow and requires a fair amount of space to land):

, like barn doors")
flaps that are designed to go mostly down (more down than up), like barn doors
The build by HK was mostly ok, except for the cheap servos (I'm going to replace at least the elevator servo), control surfaces that need to be freed up before they can move, and the stickers just interfered with flying: they were half glued and peeling off:

this scared me, I filled it with gorilla glue so that it doesn't fail

the rudder horn is mostly broken in all shipments because they don't disconnect it for shipping
I ended up putting another horn with backing plate to replace the broken one:

While having the airframe built was great, unfortunately routing wires to the rear of the plane after the fact was near impossible, I had to make holes in the airframe to painstakenly route them half inside, half outside:
 and stick the GPS/accelerometer")
I made this hole to see how I could route cables inside (not so much) and stick the GPS/accelerometer

all decked up, and ready for an FPV flight with a spotter
Now while the glider is bigger and can carry more weight, it doesn't actually have that much more cargo space than the Cularis, and when it's already built, it's also hard to put anything behind the main cabin as all the space is glued together and doesn't have much continuous empty space inside you can put extra gear in:

I had to start cutting the wood to put things underneath. Note how the ESC is also tucked in the motor hole to save space

the space meant the battery had to go on top of the pixhawk, which wasn't good since the pixhawk had to have free movement to be shielded from vibrations
")
I built this fancy battery stand :)

just enough room for a 4200 4S battery on top, not bad
, things get very packed")
You can see the hole for the 3DR radio and once you add 2 mobius (one in the front, and one just behind the battery), things get very packed
Now, the video. For my maiden, I just stuck a mobius in the rear, which upset the CG a bit, caused 3 stall spins after takeoff while I was racing to adjust the trim, and it almost caused me to crash (see the first 45 seconds). Good reminder that too much rear CG is deadly to a plane:
After everything was ready, I had 3 cameras and can switch in flight: top FPV camera, and 2 mobius underneath where the lens is moved to the end of an extension cable to fit the lens where the camera wouldn't fit:
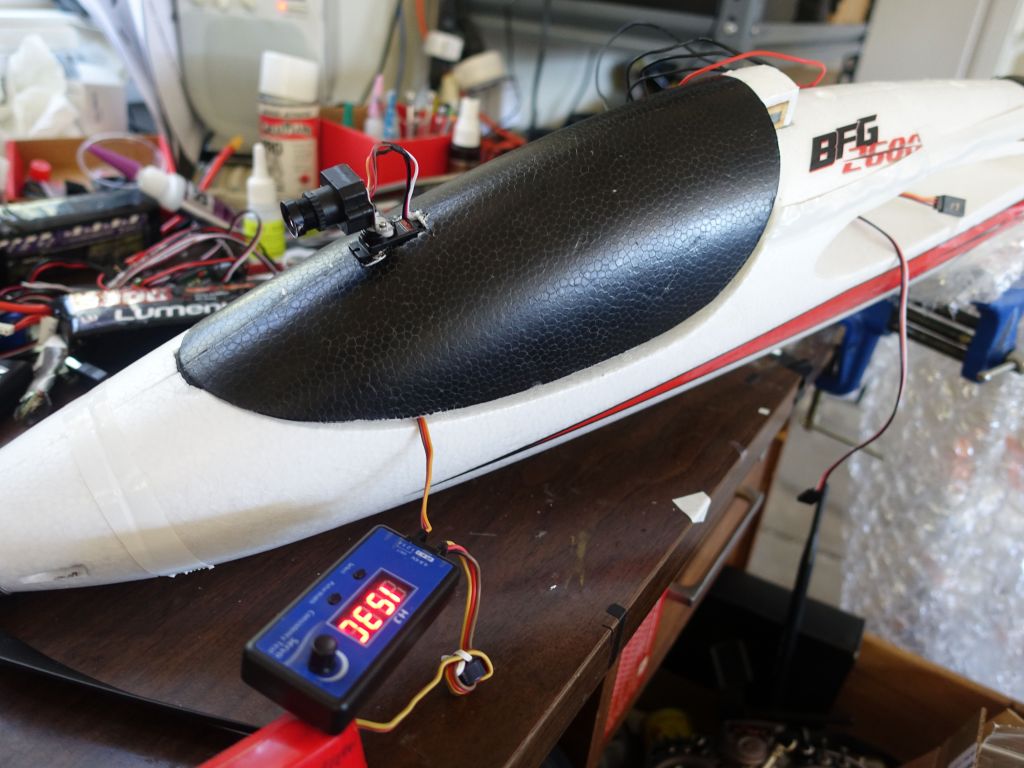


nice and sleek|clean airflow-wise, and no worries of hitting the camera first when I land thanks to the wheel

sadly, my 900Mhz VTX died, so I replaced it with a 600mW 5.8Ghz VTX for now
A few pictures from the front and rear cams on a _very_ windy day:



the soccer field I was flying from

shot from the rear camera
And this is what the OSD looks like (bad video quality, but enough to see where I'm going):

wind speed 25kph, 2.7km of gliding distnace in that direction while I was only 299m from takeoff point

I can switch to the 2 HD cameras in flight to see where they aim
")
landing, mostly against the wind, crow flaps fully deployed hence the bad glide ratio (which is what you want for landing)
If you don't get sea sick, you can see the front and rear video, along with the heavy wind sounds. It's fun to play them at the same time:
So, what are my impressions of the BFG2600?
So I do quite like the BFG2600. I hope I'll be able to soar with it one day, so far despite the huge wings I haven't been able to gain altitude on thermals yet. The good news is that it flies well, even in very heavy winds (I've tried 35kph winds so far), and has ample power to take off easily despite all the electronics it's carrying.
Update (2015/10/14)
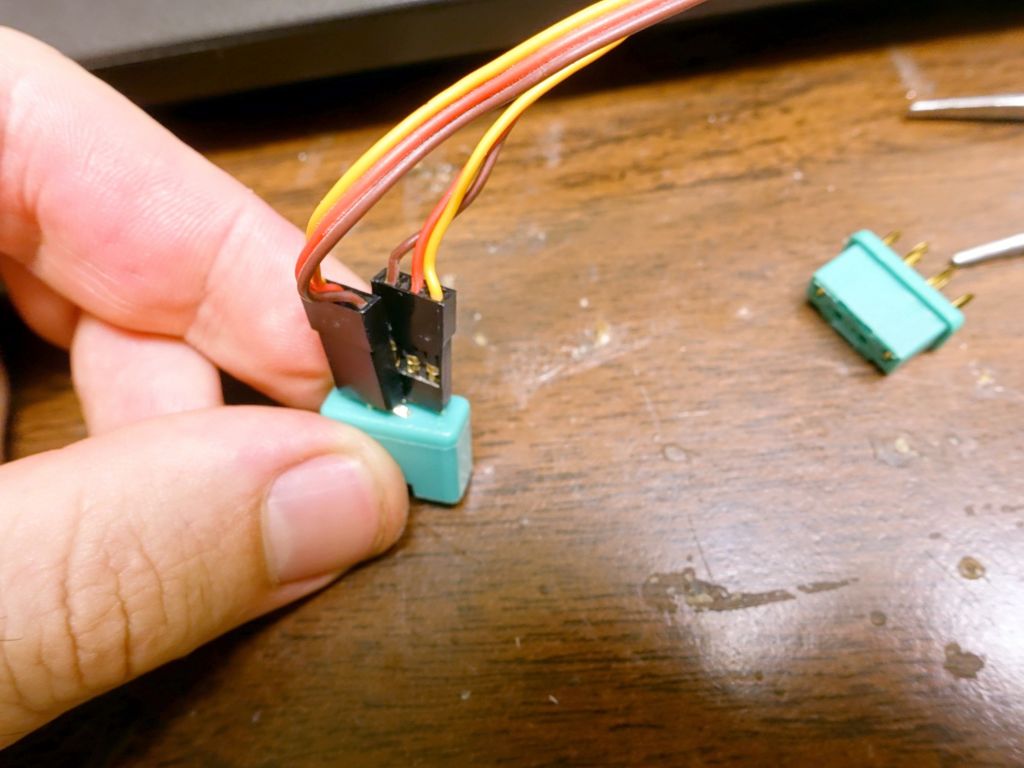
I added an airspeed sensor in the wing, however by then I decided to fix the issue of connecting/disconnecting the wings, which was a constant pain, and only going to get worse with the airspeed sensor. I hacked the MPX connectors so that I could simply plug the servo connectors into them (better than cutting the wires and soldering since I can revert easily if needed). I put a metal wire through the connector to make sure the servo connectors would stay in:
")
I've bent the back pins so that they align with the servo plugs (weird that it wasn't default)

the other side of the MPX plug, I've just soldered to servo cables going to my autopilot
 has the plug into the wing since it's the hardest one to route cables for")
the left wing (top wood flap) has the plug into the wing since it's the hardest one to route cables for

the right wing has both the servo wires and an extra set of cables for the airspeed sensor
")
the metal wires allow for securing the servo plugs, it'd be bad if they got disconnected :)
On one side I was able to put the connector inside the airframe. On the other side, due to lack of room (a camera going through the space where the connector would have fit), I just have a dangling connector, but it's not as bad since it's only one. For the airspeed I2C cable, it needs four wires, but I was able to use only 3 with a servo cable and reuse the ground from the servo connector

on one side I was able to put the connector inside the airframe
All in all, this new connection system works pretty well, I'm happy with it :) (but it sure would have been nice if this kit had come with a built in quick disconnect, I spent way too long making my own).
Update (2015/11/10)
I had a few issues with the front camera between having it take a nice front facing shot that doesn't show the bottom of the plane, and not being hit by pebbles when I land. I briefly tried to put a metal shield around it, but in the end the shield was getting ripped away on landing, it was just too close to the ground. I ended up fixing this by ungluing the wheel and lowering it a bit, giving more clearance for the camera lens without needing the metal shield:


This was supposed to protect the camera, but it got caught and ripped off on landings. Instead, I raised the wheel
I also found out that the mobius cameras leak on the 433Mhz band, so burried them a bit lower down in the plane so that they don't affect the LRS reception as much:
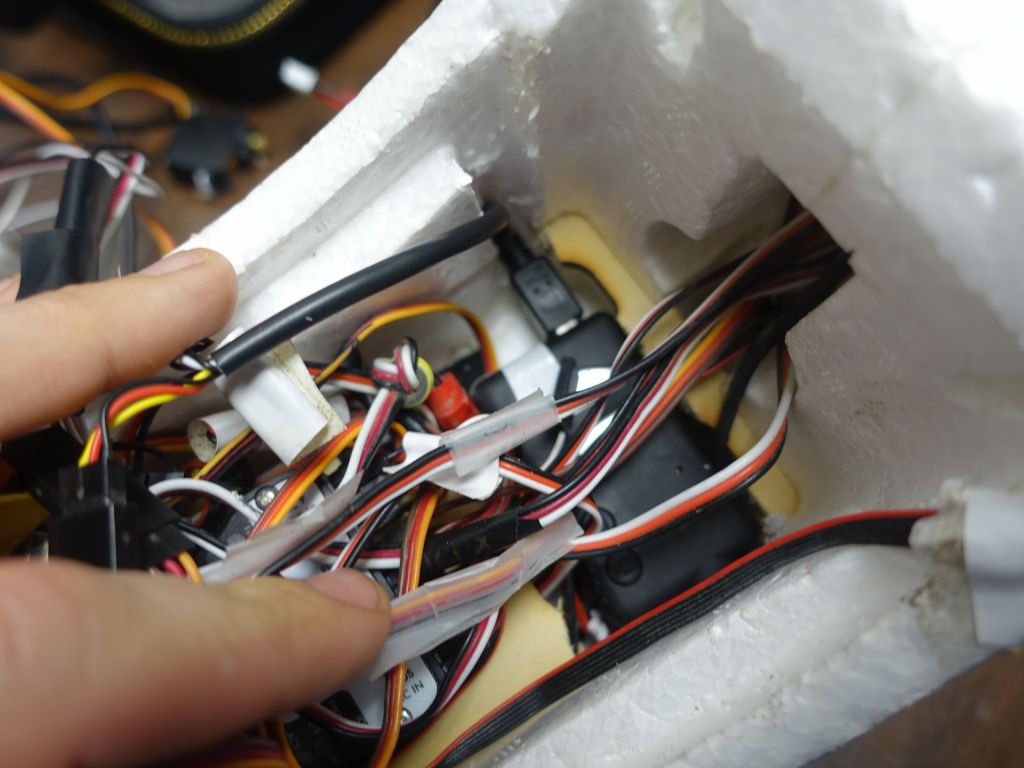


it's still a bunch of wires, hard not to have them interact