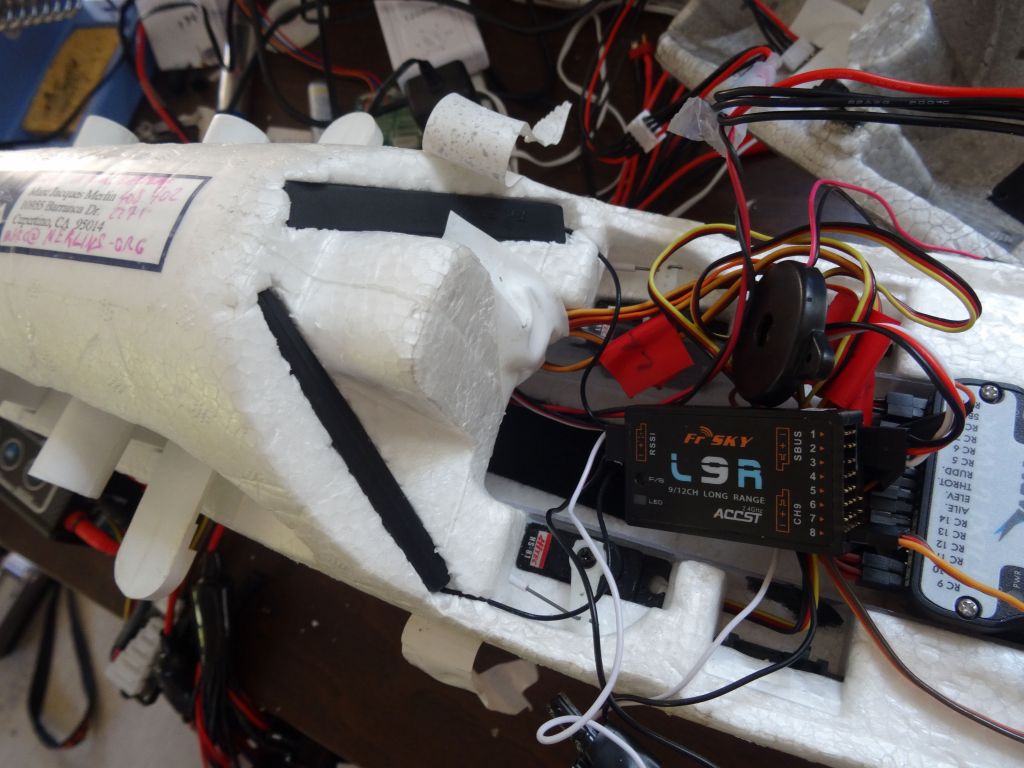
With a bit of work shaving the inside, and adding support to make the pixhawk flat, got to fit the speed controller, the OSD, Frsky receiver (later replaced with L9R):


")
I later moved the GPS/compass up, and the battery monitor down (to avoid interference from the motor)

it fits, but it's pretty full
Next, I added the 3DR radio (antenna), 2 mobius action cams (those are much better than gopro, smaller, lighter, and less cross section to the wind), with one attached to my FPV analog camera so that it can move around on the same servos:

I upgraded from an X8R to an L9R because I figured out I didn't need the telemetry from the X8R and would benefit from the extra range the L9R offers since I was getting telemetry back 2 ways already (via the OSD in the video, and via the apmplane 433Mhz radio channel), and I tried to set the antennas in a cross pattern for best range:
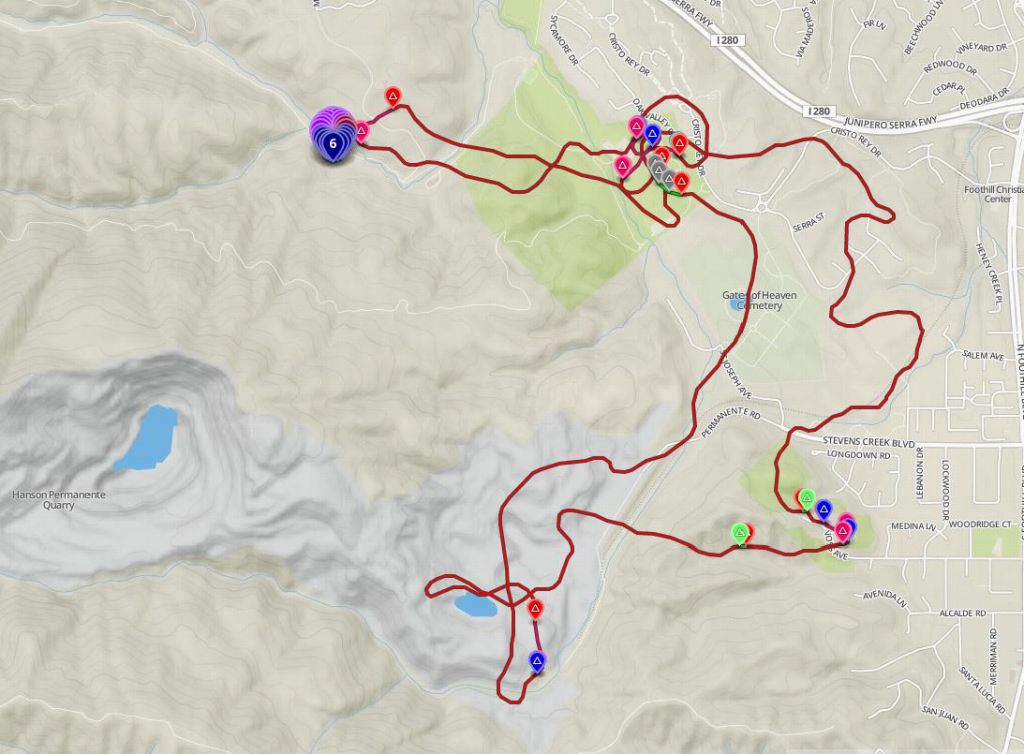
I then did multiple test flights at Rancho San Antonio to tweak the airframe with the new weight and CG, as well as test the equipment and tune it:

While I got some good video and range out of this (over 2km, around mountains even), the main issue was that my 3S lipos weren't delivering enough trust and made takeoffs iffy (the glider would go down before picking up airspeed and going back up). This meant I had to launch from the little hill in the picture above, and the rangers have decided that this is unsafe to others, so it must be forbidden, lovely...
Eventually I ended up with a launch that failed (I threw it too high up), and it instantly talled and crashed hard:
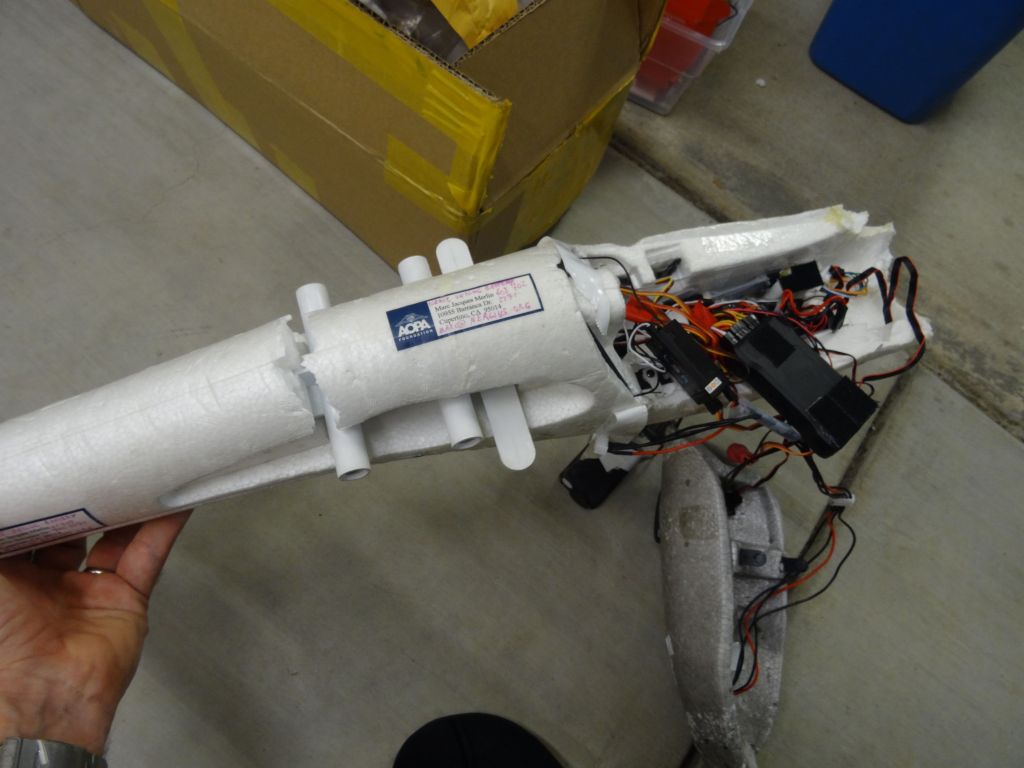
")
I lost the bearing for the motor, making field repairs impossible)
I actually fixed the first crash, but it weakened the control horn for the elevator. While the elevator passed preflight, the control horn broke in the 2nd flight causing the plane to dive to the ground with no way for me to recover. Unfortunately that crash was a lot faster (full speed, no flare), so the damage was much more serious. I'll have to replace the whole body this time:

But all isn't horrible, I still got some really good flights and videos out of it. My best one is on this page.
")