One morning I found a small racoon in your squirrel cage I had next to the shed. It wasn't there to trap anything, but there must have been a tiny bit of peanut butter left in it, and I made the mistake of leaving it open.
The racoon barely fit in there, but somehow it got in. When I found it, it was sleeping peacefully curled up like a cat (they are nocturnal), but it woke up when it heard me. I released it right away, and it slowly made its way up a tree where it could resume sleeping for the day without being in the sun.
Racoons unfortunately can become pests, but they are otherwise pretty cute animals that are happy to eat from your hand, and do so gently (not like squirrels that can easily bite you and give you rabbies). We're not going to feed ours though since like bears you want them to remain wild, or they'll start going through your trash and become a pest.
At least they don't try to jump to our bird feeder like the squirrels, so that's good enough for me :)
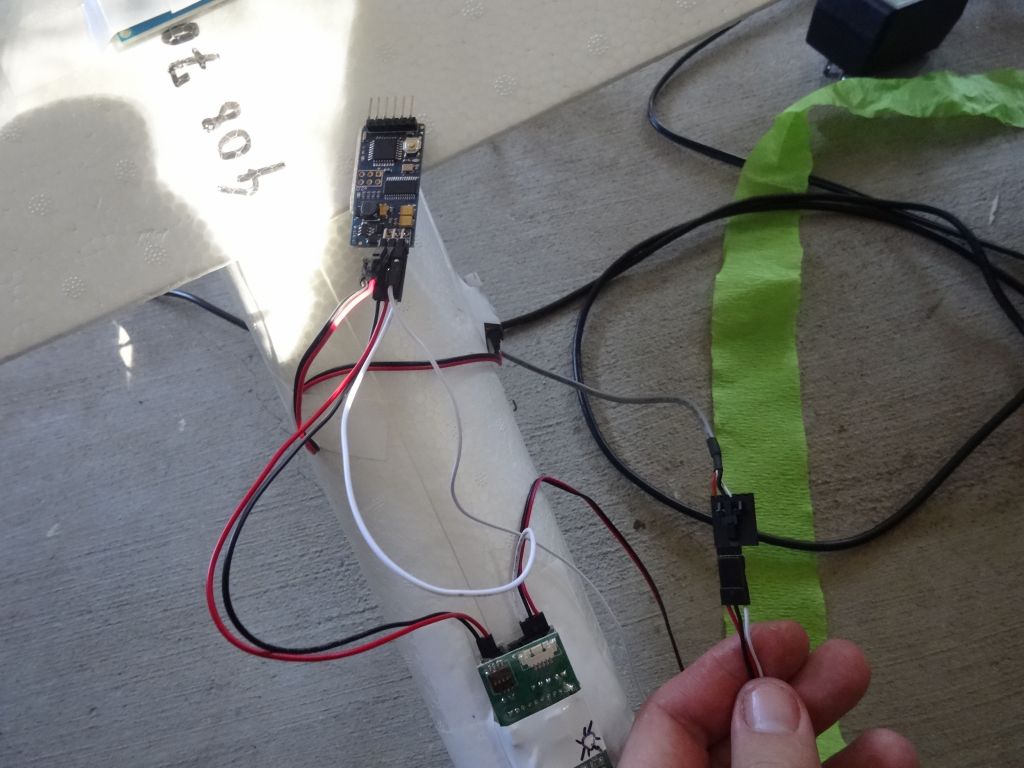
I wanted a water sensor for my water heater that would both alert me in the house, and as remotely when the sensor was tripped.
This is what it looks like:
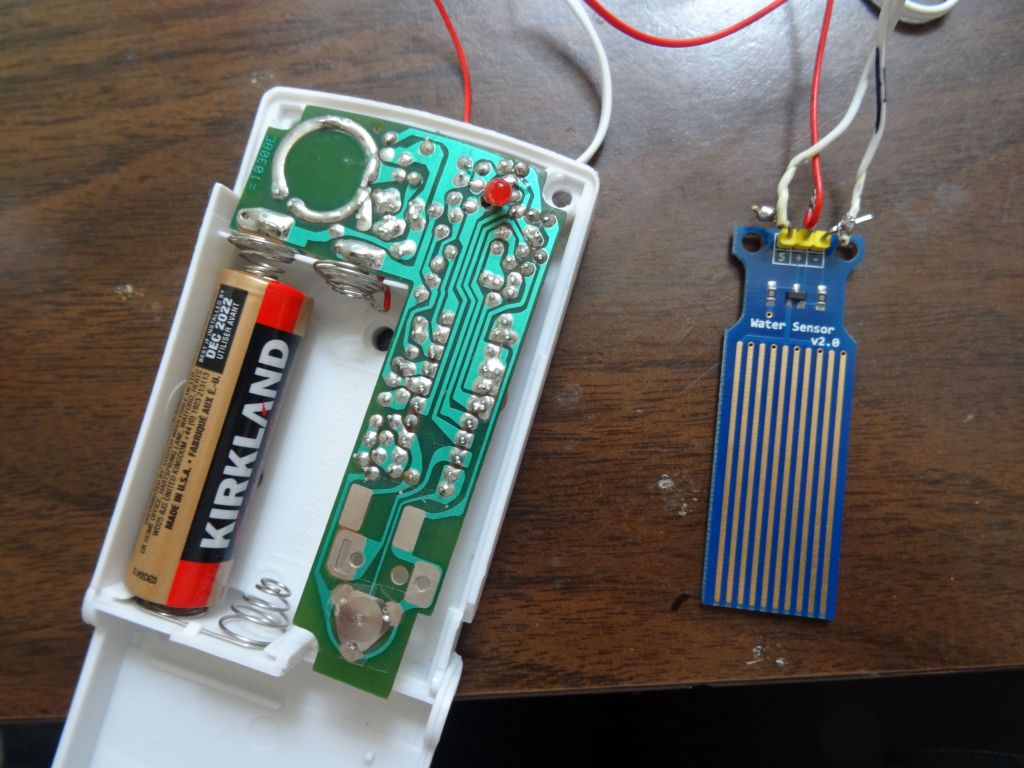
I analysed how the DS10A worked, and due to sheer luck in its design, the wires going to the magnetic sensor turn out to be ground and signal, and the water sensor conducted enough current between them to allow triggering of the DS10A:
Wiring is totally trivial, you only need to use a 3rd wire connected to the plus from the 2 batteries, and it "just works". For extra credit, I wired a buzzer between signal and ground, and my water sensor passed enough current to allow the buzzer to run.
The DS10A, I have a stack of, which you can sometimes find on ebay for cheap in bundles, and my house is already wired to receive those signals, so it was trivial to generate an Email and page from misterhouse when this sensor got triggered.
It had been 6 years since I last went to the SCCMAS Airshow, incidently back then also with Daniel, although I happened to have my dad who was visiting and quite enjoyed it.
After doing stage 1 some months back, I went back to learn stage 2. I definitely got better with downshifting the 2nd day once I figured out that my foot was too wide and I was pushing brake and gas a the same time, preventing downshifts from happening. This was fixed by turning the brake pedal two turns towards me.
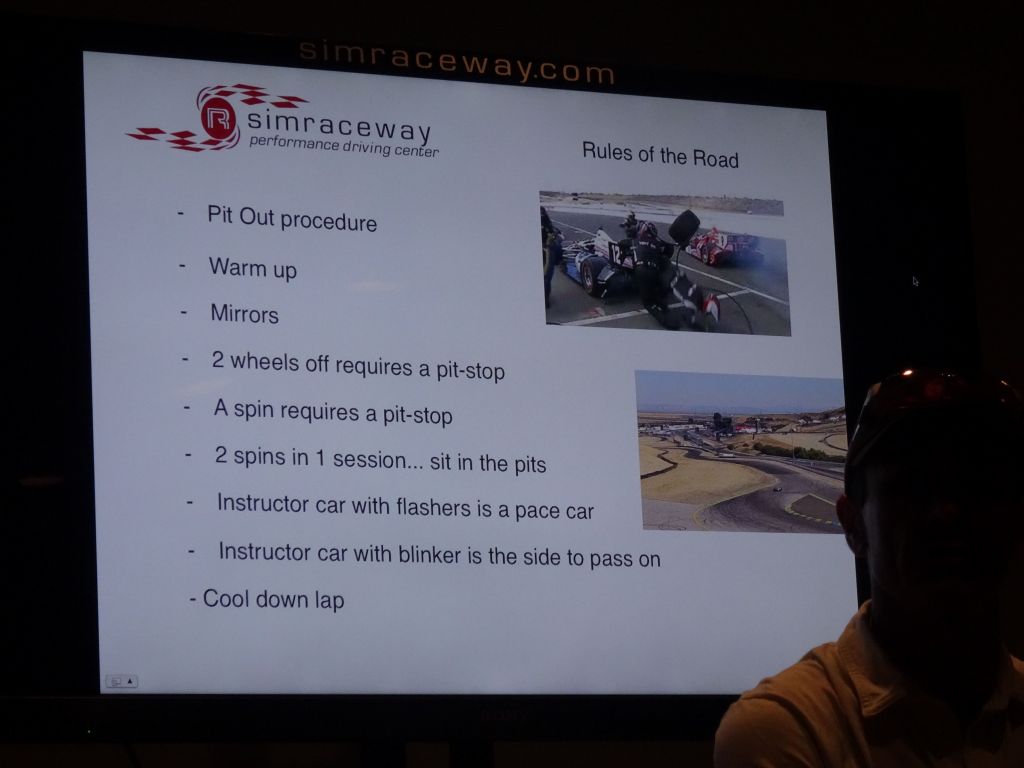
Here are some of notes of what I learned those 2 days:
faster upshift (barely get off throttle)
faster and harder transition from gas to brakes (same end pressure, faster transition)
Do not brake and gas, this prevent shifting
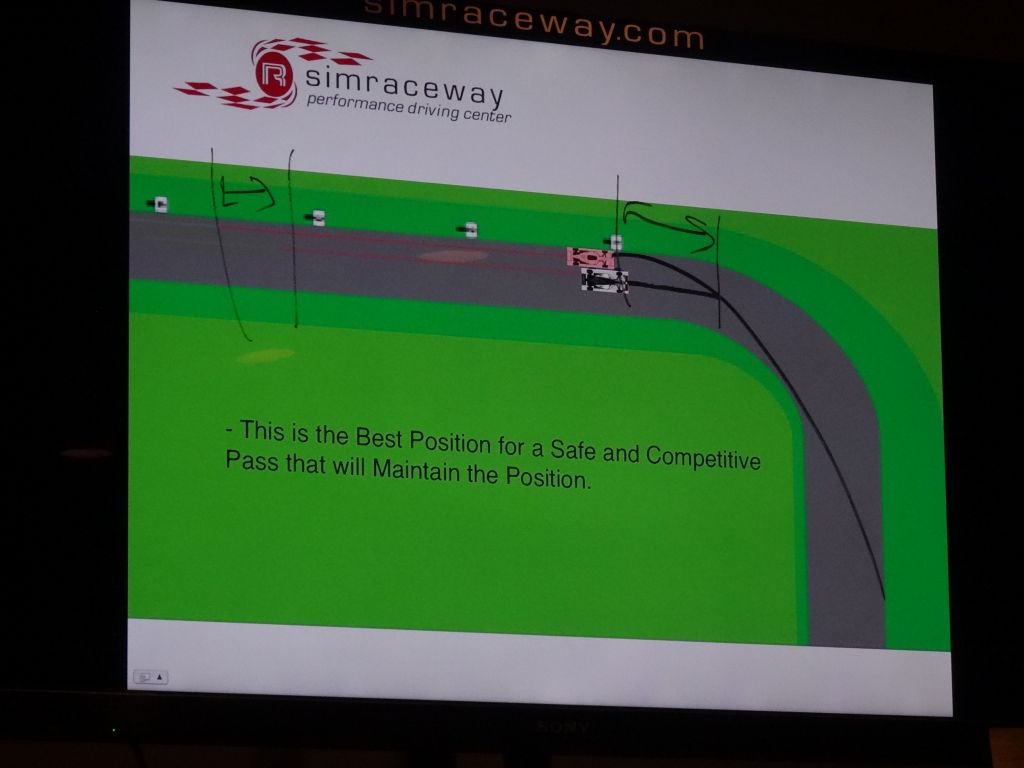
passing: When you are side to side but not quite for a turn, you must release the brake to win the corner since you cannot stop any more. If someone is trying to pass on the outside, you brake even more to leave them room to be side by side with you. The inside guy gets the apex no matter what, even if not wheel to wheel
And notes relative to actual turns:
carry speed into 2, do not brake so much and gas back up, just keep speed going up
lift before turning 3a, start turn and put a bit of gas more gradually (do not remove gas)
4 brake early enough not to understeer
5 flat out
6 good brake on top but not so hard, light brake, coast, and early gas half way down
7 brake 3rd cone, good brake pressure
8 go faster and turn later so that I can connect 8a
9a get on the brakes faster, be a bit faster turning the wheel from 9a to 9b, scandinavian flick
10 flat out, shift before turn in 10 so that I'm not as sluggish in the turn
The 2nd day in the morning, I got a flat on one of my tires without knowing, which made the car very oversteery and before I knew it, I spun in the chicane and got to see why:
This time we were running the full course and had slicks on the cars, so it was a good difference from level 1.
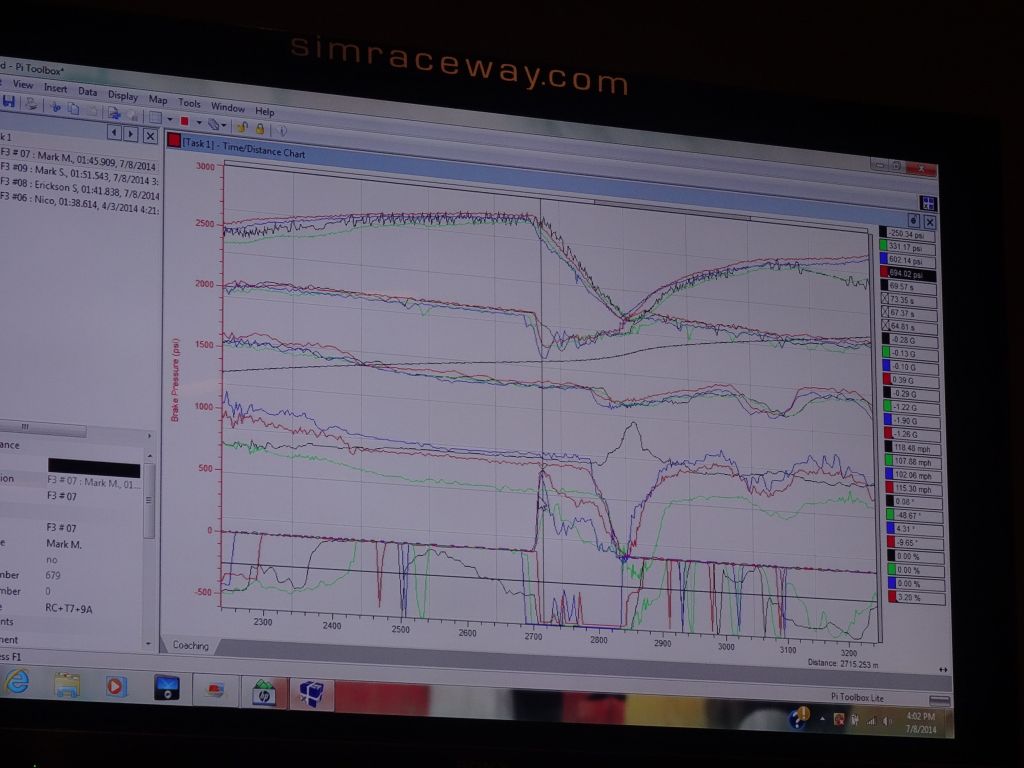
We only had 4 people in our group, and one was close to a professional racer, so I didn't get too close to him. As a result our end times on the 2nd day were the following: our teacher Nico had a benchmark time of 1:38, our next best driver was at 1:41, I got down to 1:43, and the 2 other students with less experience were around 1:48.
After driving, we compared our data acquisition to see what we were doing wrong or could improve:
My last 2 sessions the 2nd day in the afternoon, my times were reasonably stable and in the down direction :)
One before last session: 1:48, 1:48, 1:47, 1:48, 1:45, 1:48, 1:46, 1:46, 1:46, 1:46, 1:47, 1:46, 1:48
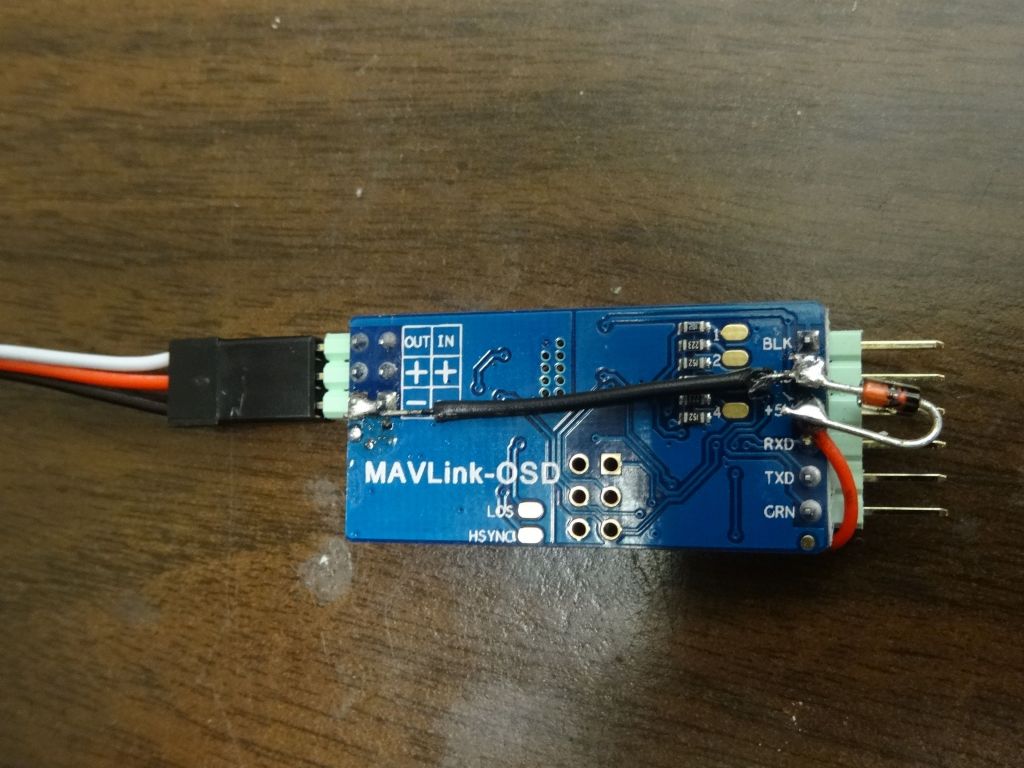
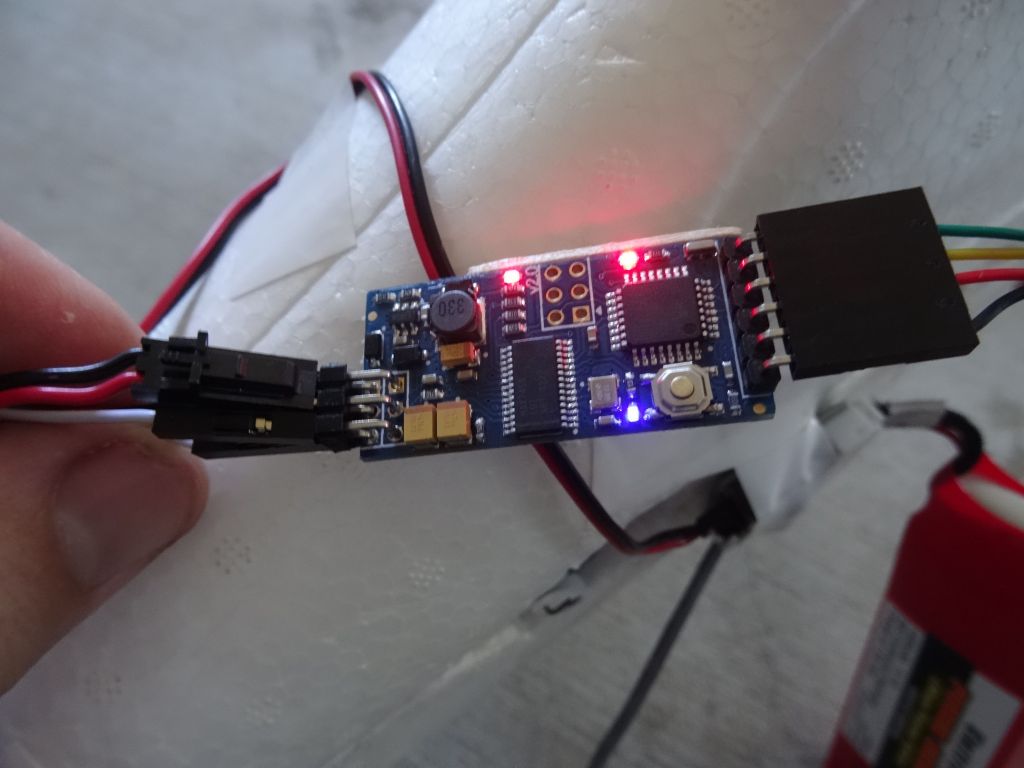
After reading on the voltage regulator for 12V on the minimOSD runs too warm and can die on some versions, or generates too much noise in the 433Mhz range which is bad for LRS radio control, I figured I'd do the 5V conversion.
Initially the idea is to send 5V from the APM side to the analog side. To avoid ground loops and burning the video chip, I also did the recommended ground connection on both sides:
Next, I added some small heatsinks on both chips, it's especially important for the video chip that can overheat and die, bad if you're flying when that happens :)
Now, once you power the analog side from the 5V rail, it's not regulated and the video chip tends to die by the time votlage reaches 5.3V, so I added a 5.1V zener diode to get rid of possible voltage spikes. With that, while my first OSD died after minimal use, the 2nd one has worked great so far:
But one last thing I did was to realize that since I was powering my camera with 5V too and my transmitter was already providing a perfectly good 5V signal, I might as well poewr the entire thing from the transmitter side. For that, I added another wire going across with a jumper to let me pick whether 5V comes from the analog side, or the APM. Another thing to note is that powering the OSD from the APM internal power works, but is out of spec if you're also powering the video chip, so it's another reason to just power all of the OSD from its analog side and the video transmitter power supply.
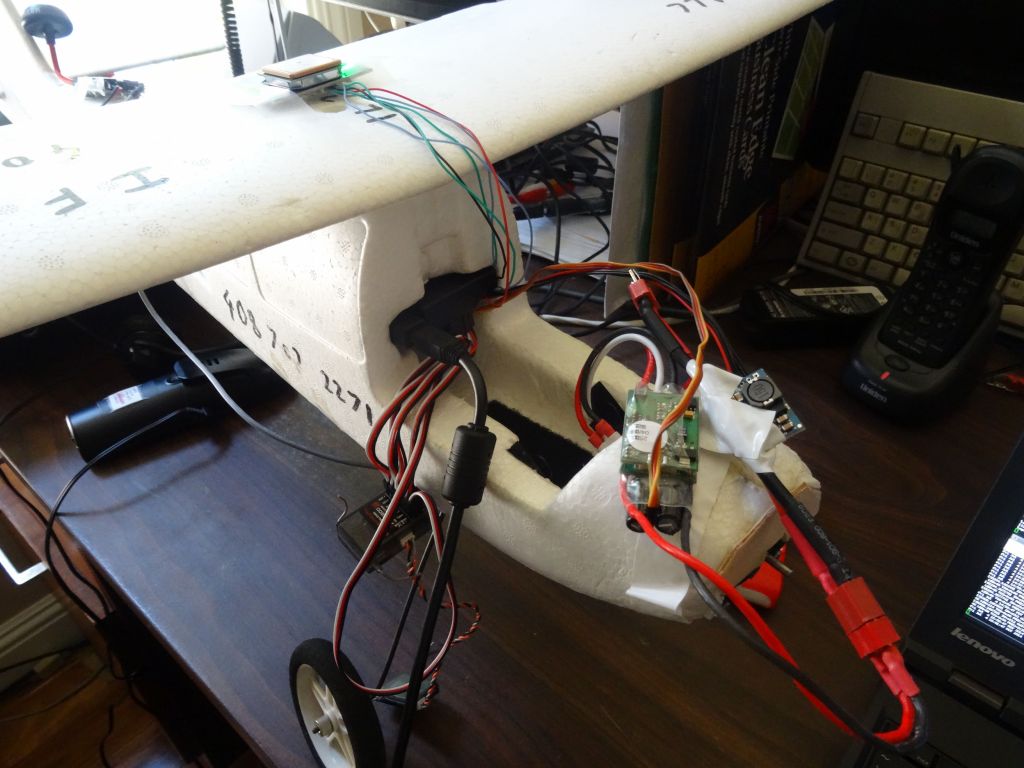
After having abused my minimag in so many ways that I stopped counting, I thought I'd try putting an Ardupilot APM 2.6 in it, and add an FPV camera and OSD, because why not? :)
While I have an overpowered 250W motor, taking off with the extra weight is not the problem, but shoving all that extra stuff in the very tight bay was kind of challenging.
I got a few flights out of it, and then had a short circuit which burned the APM, but thankfully that happened on the ground, and it'll be fine with a new APM I already have at home.
The APM happens to fit upside down just above the battery:
All this stuff so barely fits, and you can see the transmitter and antenna on the tail:
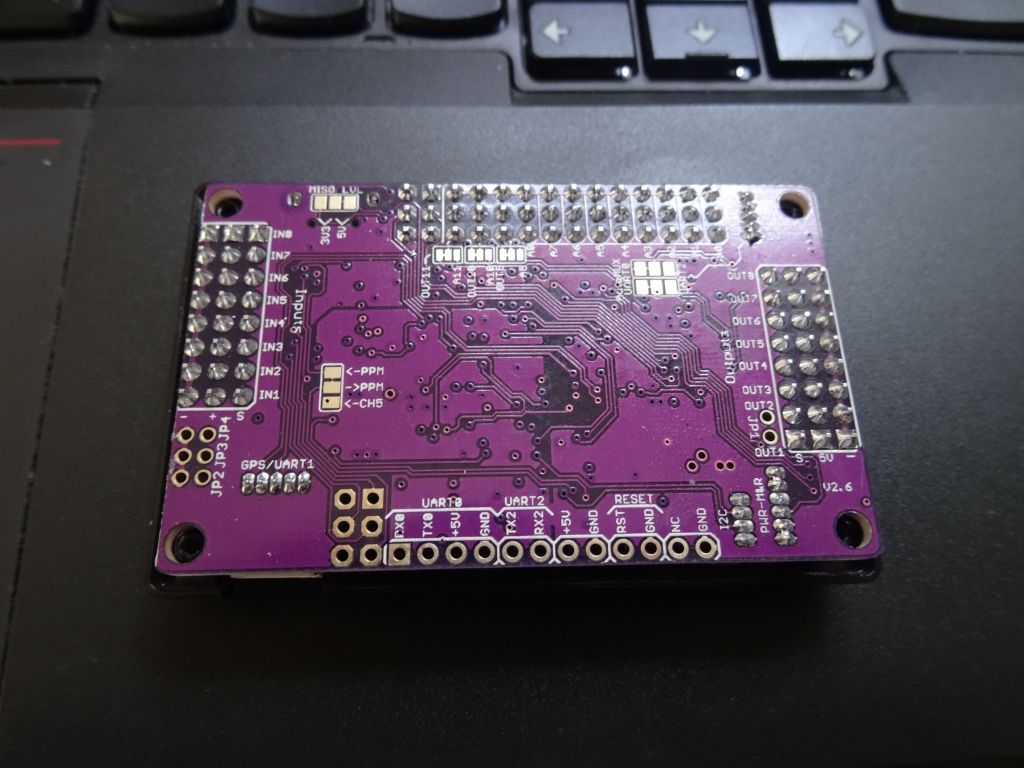
The supposedly APM 2.6 chinese clone board I got was actually a 2.5 with built in compass. It took me a while to figure that out, and I had to cut the trace to the compass for my external compass to finally start working. I do not recommend buying from goodluckbuy on ebay or elsewhere, they ship totally untested stuff that wasn't even meant to work together. I found multiple problems in what they shipped and they didn't seem super interested when I told them what was wrong and what they should change. But worse, in my 2nd shipment, I got a GPS board that had no GPS on it, and 3DR clone radios that just didn't work. Lesson learned, don't buy from them.
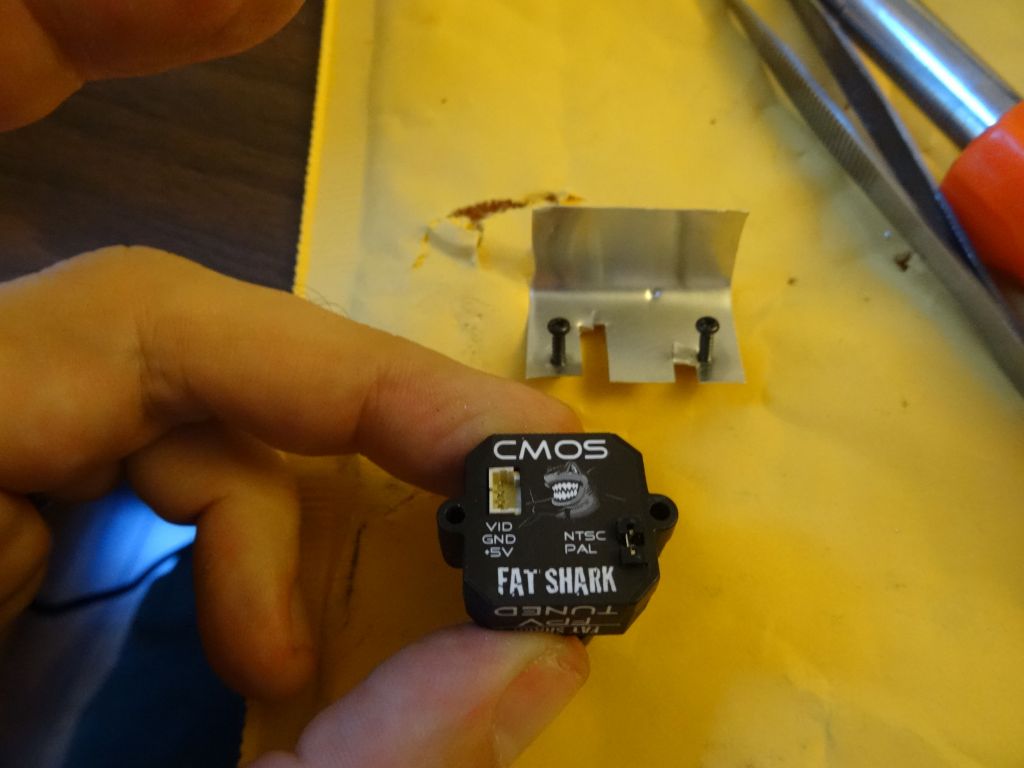
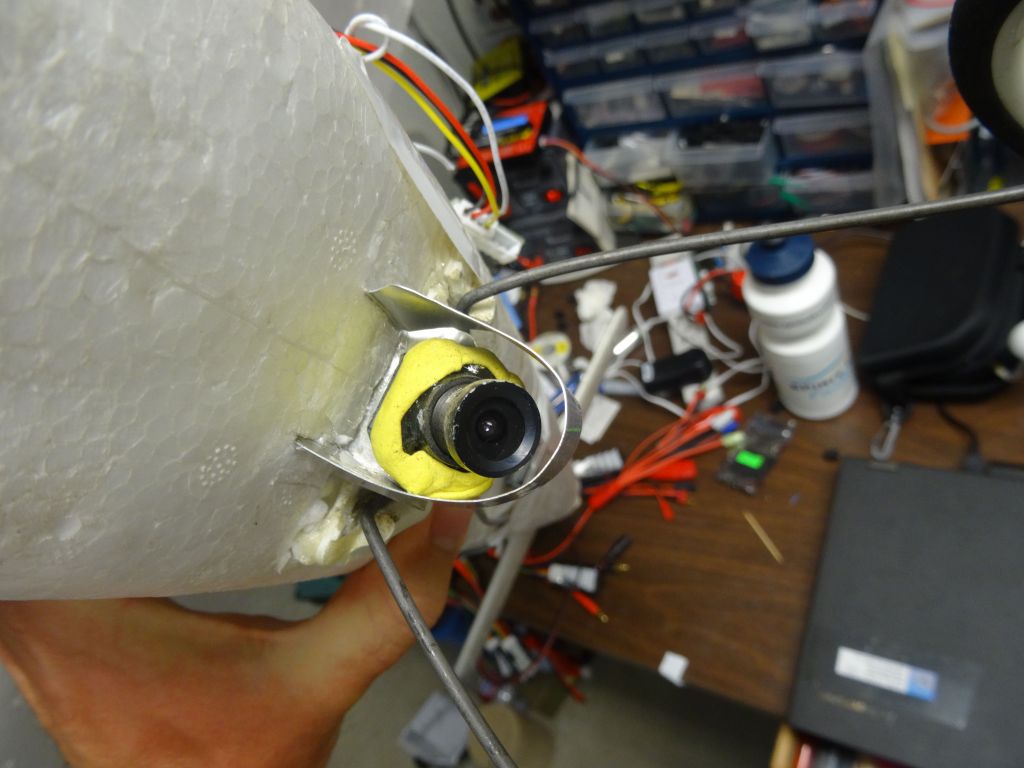
I put a basic fatshark for FPV, and make a custom mount out of a piece of metal:
The problem is that my gear collapsed on one landing and the plane landed on the camera, breaking off the top. It was a total mess putting the lens back together after the bits fell out, and even more work gluing the thing back on in a way that the picture was shark on all 4 corners (damn that was super hard, I ended up using putty to hold it until the picture looked good, and glued it then, but that took hours).
This is what the circular polarized antennas look like inside:
And I had to do special wiring to send 5V to the camera while sending 12V to the OSD (from the 12V power supply coming out of the transmitter)
I ended up learning the basics of how it all works and doing a few successful test flights on my minimag before the APM died. This let me redo this on my glider much faster with what I learned on the minimag.




































")

































")















")
")





")




























")




")