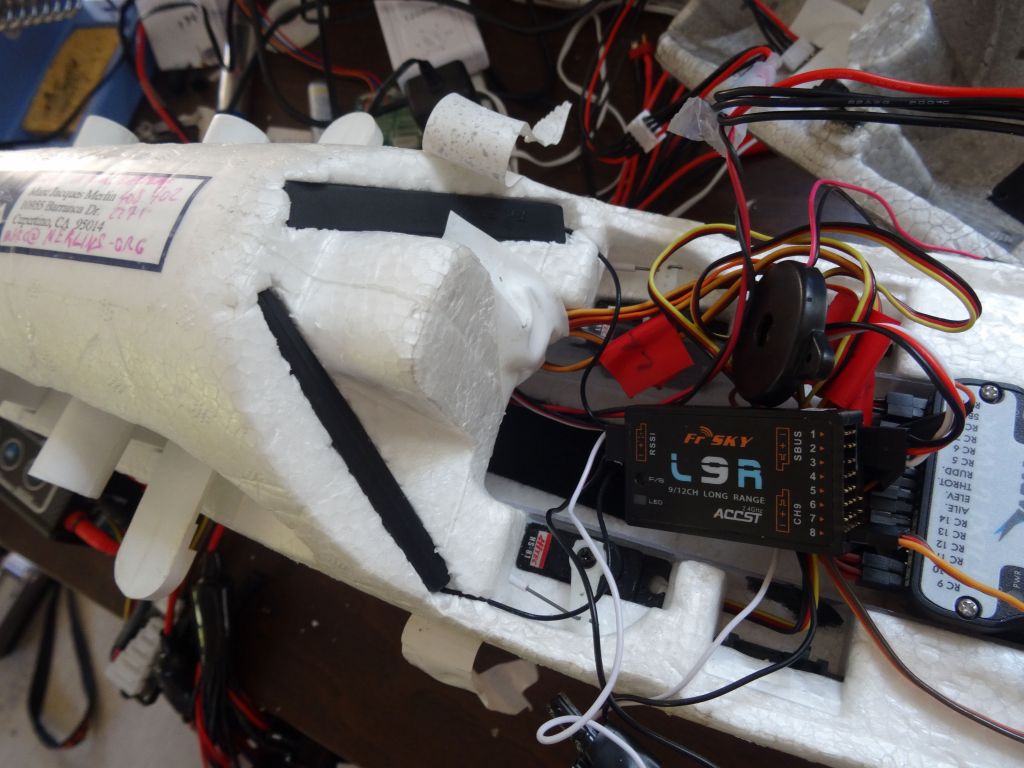
With a bit of work shaving the inside, and adding support to make the pixhawk flat, got to fit the speed controller, the OSD, Frsky receiver (later replaced with L9R):
I later moved the GPS/compass up, and the battery monitor down (to avoid interference from the motor)
it fits, but it's pretty full
Next, I added the 3DR radio (antenna), 2 mobius action cams (those are much better than gopro, smaller, lighter, and less cross section to the wind), with one attached to my FPV analog camera so that it can move around on the same servos:
I upgraded from an X8R to an L9R because I figured out I didn't need the telemetry from the X8R and would benefit from the extra range the L9R offers since I was getting telemetry back 2 ways already (via the OSD in the video, and via the apmplane 433Mhz radio channel), and I tried to set the antennas in a cross pattern for best range:
I then did multiple test flights at Rancho San Antonio to tweak the airframe with the new weight and CG, as well as test the equipment and tune it:
While I got some good video and range out of this (over 2km, around mountains even), the main issue was that my 3S lipos weren't delivering enough trust and made takeoffs iffy (the glider would go down before picking up airspeed and going back up). This meant I had to launch from the little hill in the picture above, and the rangers have decided that this is unsafe to others, so it must be forbidden, lovely...
Eventually I ended up with a launch that failed (I threw it too high up), and it instantly talled and crashed hard:
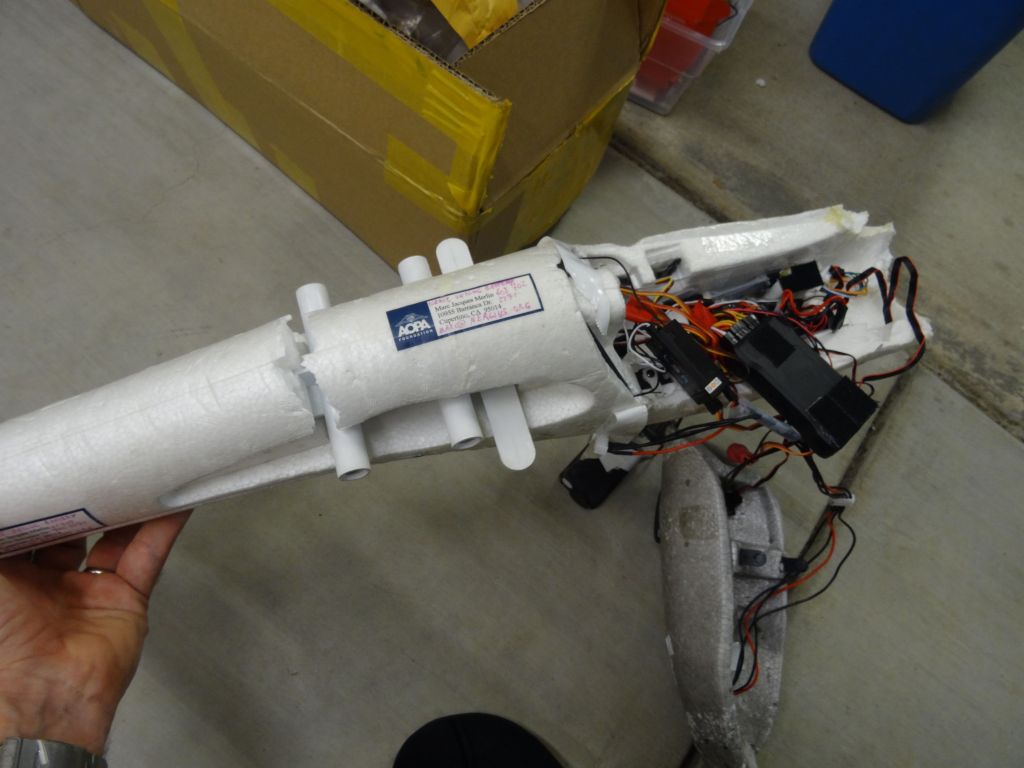
I lost the bearing for the motor, making field repairs impossible)
I actually fixed the first crash, but it weakened the control horn for the elevator. While the elevator passed preflight, the control horn broke in the 2nd flight causing the plane to dive to the ground with no way for me to recover. Unfortunately that crash was a lot faster (full speed, no flare), so the damage was much more serious. I'll have to replace the whole body this time:
But all isn't horrible, I still got some really good flights and videos out of it. My best one is on this page.
While my first Cularis had an unfortunate ending, it was a good starter FPV platform that could fly with a total weight of 2kg (carrying over 700g of gear, including 2 mobius HD cameras, the analog camera used by the transmitter, and the autopilot).
The flight below is best viewed full screen in 1080p to appreciate the OSD view (not that great, but what I was flying with) vs the 2HD pictures (front and rear) and the flight replay on a map showing where the plane was at that time, showing how I flew around a hill and overflew a quary I didn't have light of sight to, at all.
decked out, probably more than it was meant to :)
3 cameras, one for OSD, 2 high res
ready for flying
Here is the main video (again, recommended to see full screen):
The stats at the end show that:
at its farthest point, I was at 2.2km from takeoff point. Considering the hilly terrain and almost flying behind hills, that's not bad :). I'm told the L9R can do 5km in good conditions.
total distance flown about 15km on a 2400mAh 3S pack. It wasn't stone dead on landing, but it was quite low, although thankfully still in the "can be recovered" range.
total height was a bit over 300m above elevation point, but I never really fly that high above terrain, this was necessary to reach proper altitude when crossing the hills with power lines by the cement plant. In other words, my AGL (above ground elevation) was not that high, but high enough to stay safely above rising ground level.
2100mAh from a battery that's allegedly 2600mAh was close enough for that flight. Note that I glided the enter trip back, and that the OSD was showing what glide ratio I had. On landing I was way high, but thanks to a crow flaps mode I had made, flaps+ailerons became huge spoilers and allowed my glider that couldn't have landed from that high, to land just fine :)
The video crapped out a bit due to the distance and the fact that I had to manually re-orient my patch antenna a few times (guesstimating while wearing the goggles and flying). I also almost flew behind a ridge and the video (600mW) and Frsky L9R mostly held kept the signal running.
The video commentaries are from my wife who was wearing a 2nd pair of goggles and had never seen an FPV flight :)
The 2 high res videos were taken with 2 mobius cameras and the virtual flight in the bottom right was created with the datalog from the ardupilot pixhawk that was controlling the plane when signal was lost. The videos were hand synchronized by me because the OSD video was 10 seconds short as a result of the video dropouts.
If you'd like the individual videos:
Unfortunately, my Cularis met its demise after this flight, but like the condor it'll be reborn from its ashes soon :) This page also shows how it was built and what's inside.
I bought a fatshark with integrated pan/tilt system, but found out the hard way that it's not designed to be mounted upside down (i.e. having your camera upside down without the picture being upside down).
Unfortunately, the integrated fatshark mount is not designed to be used upside down. As sad as it is, I had to take it apart, use a soldering iron to move/widen some holes by melting the plastic, and then fill the gaps from the old holes to avoid having dust go inside and end up on the sensor (there are also a couple of tabs to break/cut out/melt away to allow for screwing the back plate upside down).
Here are the pictures:



")



")

")