2019/01/21
Donkey Car with Tensorflow Video Analysis at Open Hardware Miniconf at Linux.Conf.au 2019
π
2019-01-21 01:01
in Arduino, Linux
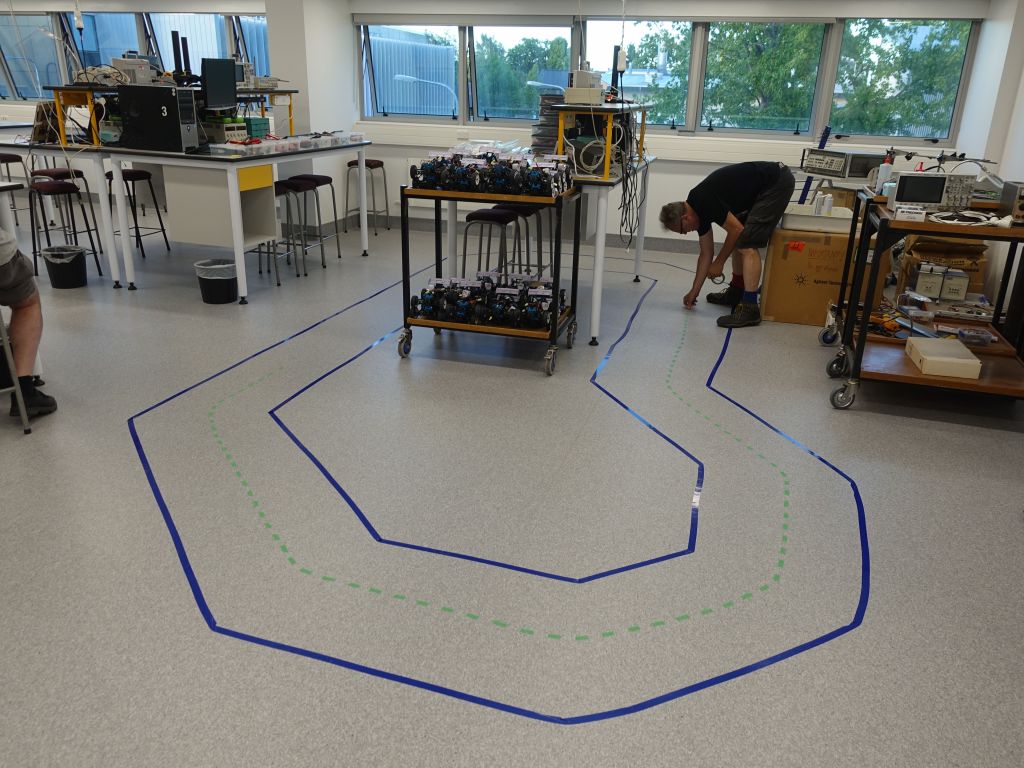
This year, the Open Hardware Miniconf team designed a donkeycar for us at LCA 2019 Christchurch. It's a car that navigates by itself using its onboard camera connected to a Raspberry Pi using training video data gathered and analysed offline by tensorflow. That sure was an ambitious project!
I arrived the day before to help finish up the kits for the next morning:


")
the cars were eager to perform :)

Andy and Jon who ended up working all night to make sure the kits would work the next morning
The next morning, we showed up to build the kit:
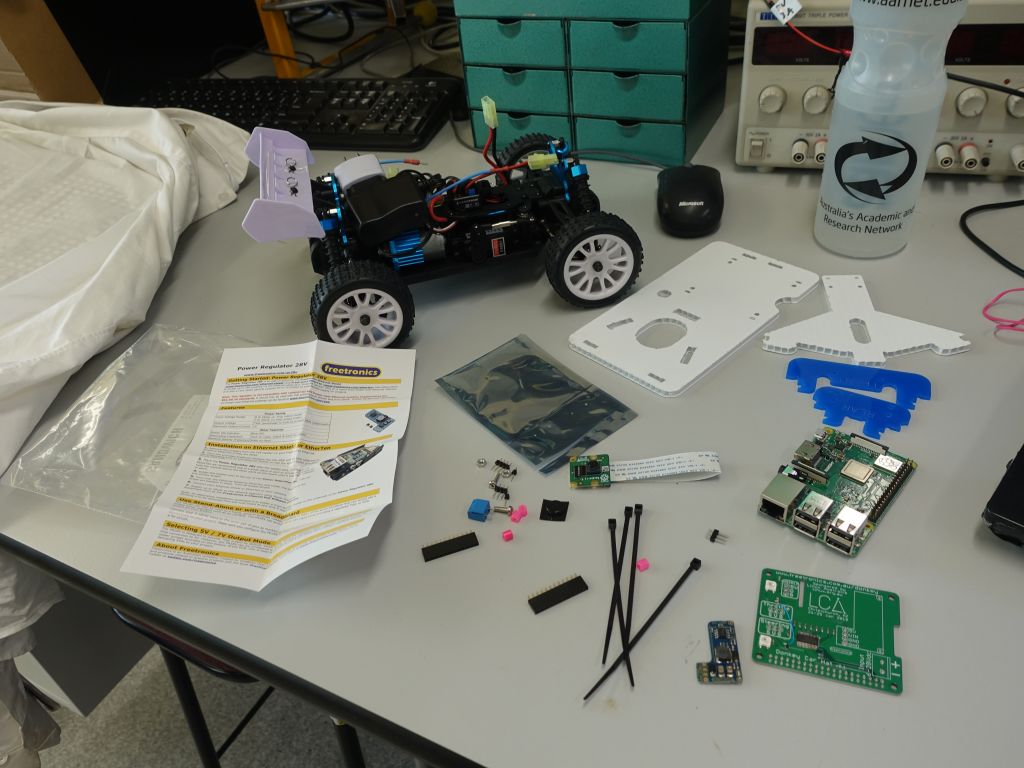



rPi with custom last minute hat for the donkey car

done!

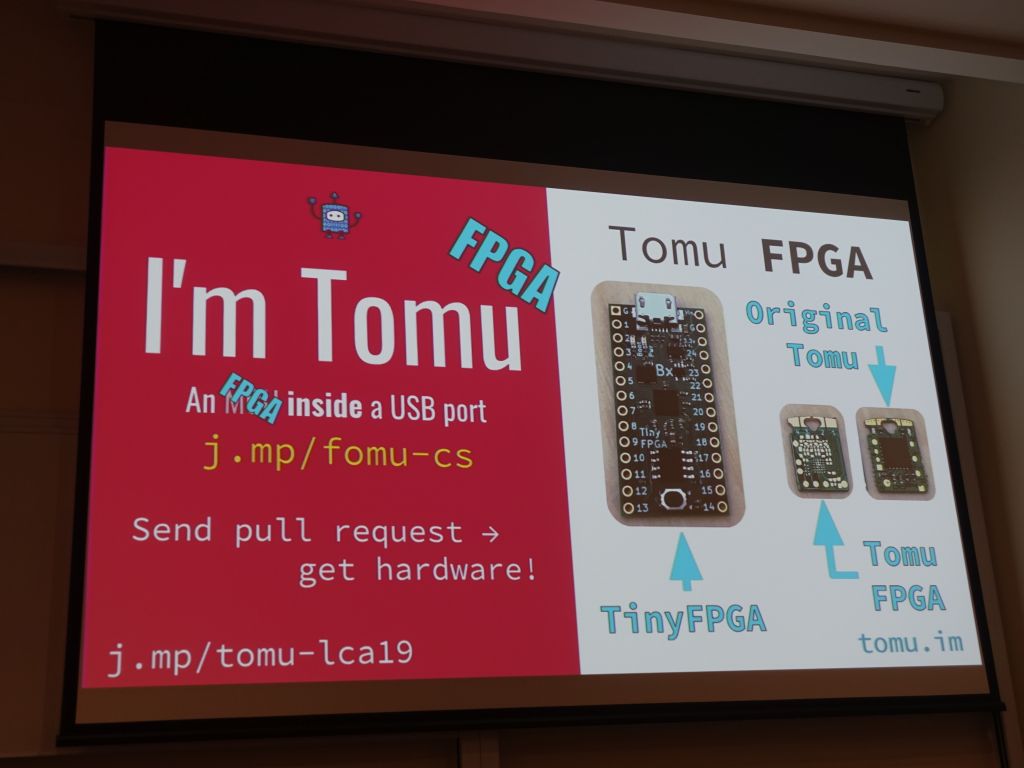
Jon gave a talk about the car design

Nice way to support 5V neopixels on 3.3V microcontrollers
We then had a few talks:
Including mine on the history of linux.conf.au hardware miniconf
After the miniconf, we had a few tries at getting our own cars to self drive after training:

")
I decked out my car with neopixels, because bling! :)
